Robot visual servo control method based on structured light
A technology of robot vision and servo control, applied in the field of visual servo control, can solve the problems of poor accuracy of target position information and inaccurate information, and achieve the effect of high accuracy, accurate grasping or assembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
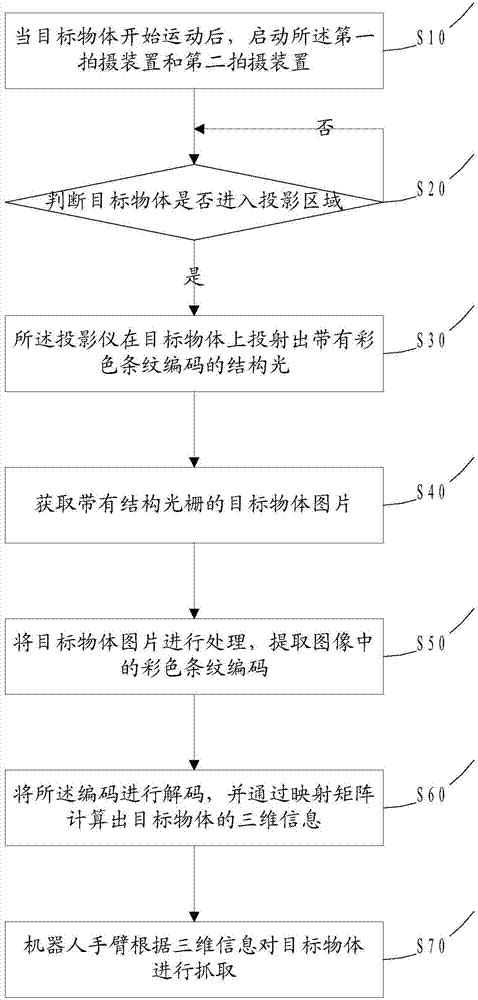
[0022] Please refer to Fig. 1, a robot vision servo control method based on structured light, including a projector 10, a first camera 20, a second camera 30 and a robot 40, the first camera 10, the second camera The device 20 and the projector 10 are all installed on the arm of the robot 40, and the method includes the following steps:
[0023] S10: Start the first photographing device 10 and the second photographing device 20 when the target object starts to move.
[0024] The first photographing device 10 and the second photographing device 20 are two color industrial cameras, the position info...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com