Master-slave control flexible continuum robot device and control method thereof
A continuum and robot technology, applied in the field of robotics, can solve problems such as difficult control, non-unique inverse solution of robot kinematics, and insufficient intuitive control of flexible continuum robots. It has wide application prospects, unique operation and obstacle avoidance functions, The effect of easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
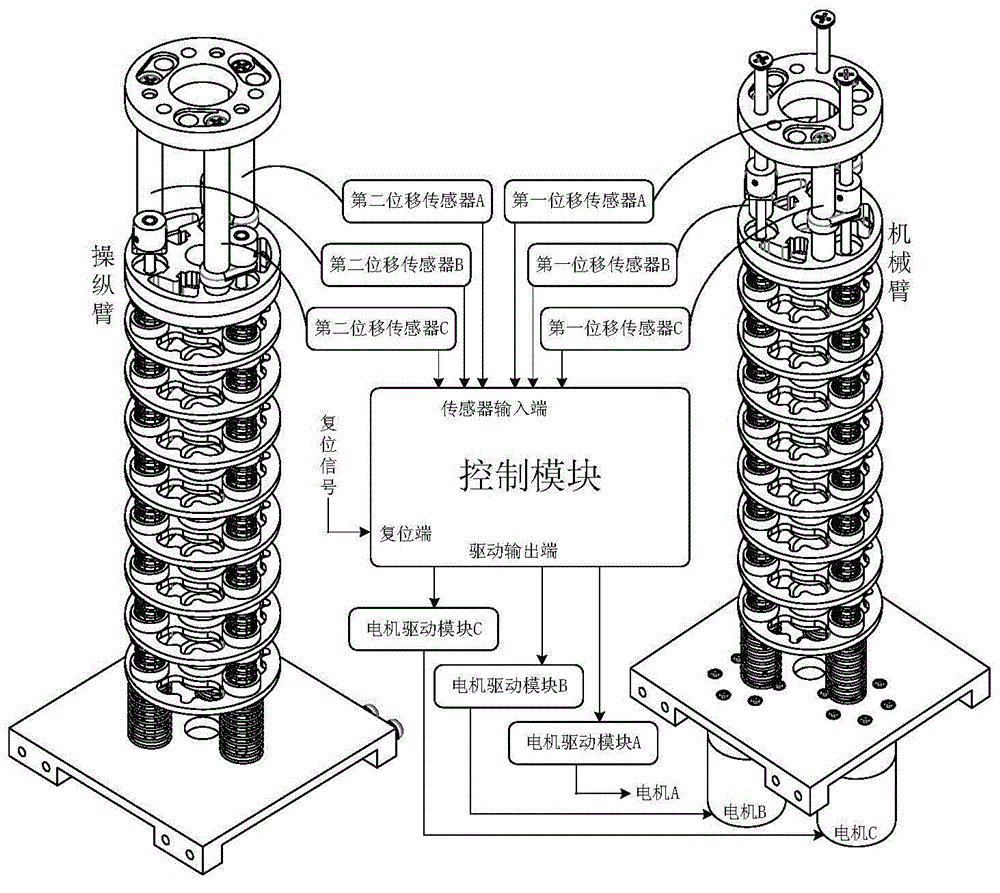
[0052] An embodiment of the master-slave controlled flexible continuum robot device of the present invention is figure 1 shown, including the manipulator, robotic arm and control system;
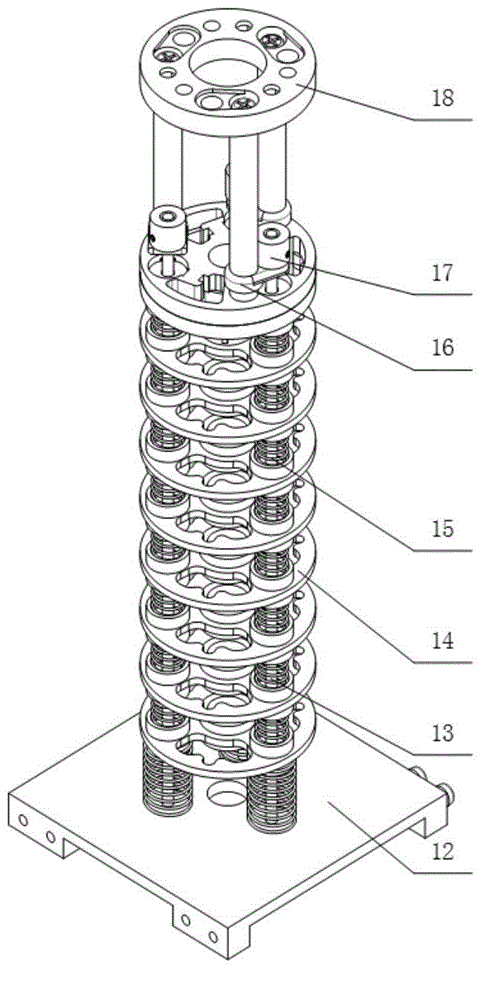
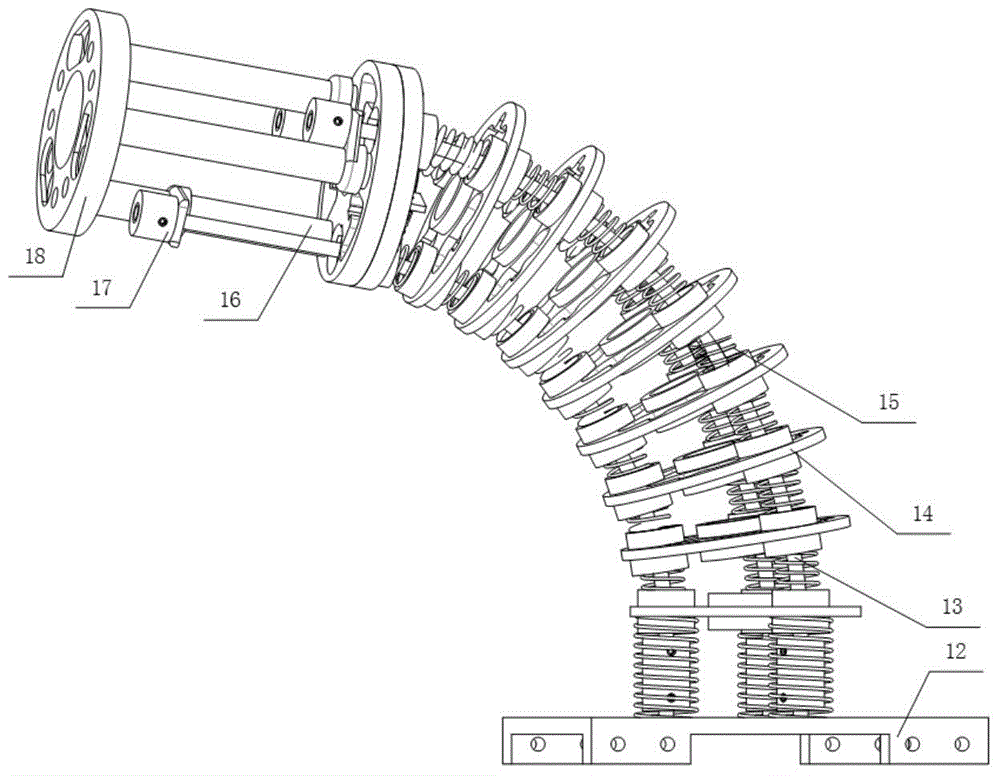
[0053] The manipulator, such as figure 2 , image 3 , Figure 4 As shown, n manipulation arm units are included, and n is a natural number; n is 2 in the present embodiment;
[0054] The manipulation arm unit includes a base 12, 3 passive flexible rods 13, 3 second stops 17, 3 second displacement sensors 16, at least 2 middle plates 14, a second spring 15 and an end plate 18; One end of the passive flexible rod 13 is fixedly connected to the base 12, and the other end of the passive flexible rod 13 is fixedly connected to the second block 17; the intermediate piece 14 is arranged between t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com