Robot autonomous obstacle avoidance moving control method based on distance vectors
A technology of distance vector and control method, which is applied in two-dimensional position/channel control and other directions, and can solve problems such as complex models, regardless of the actual size of robots and obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention is described in detail below in conjunction with accompanying drawing and embodiment, but embodiment is not intended to limit the present invention, and all adopt similar structure of the present invention, method and similar variation thereof, all should be included in the protection scope of the present invention.
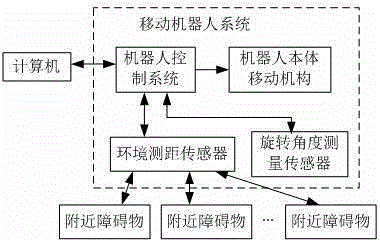
[0033] The structure of the mobile robot system based on distance vector is as follows: figure 1 shown, including computer and mobile robotic systems. The computer performs wired or wireless control on the mobile robot in the environment, controls the state of the mobile robot, moves the target point or moves freely in the environment. The mobile robot system includes the robot control system, the moving mechanism of the robot body, and the distance measuring sensor and the rotation angle measuring sensor carried by the robot itself. The mobile robot system has the function of autonomous movement, and the robot control system control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com