Bionic robotic fish jointly driven by driving joint and driven joint
A technology of active joints and robotic fish, applied in the field of bionic robotic fish, can solve the problem that the overall efficiency of the tail fin propeller has not been significantly improved, and achieve self-adaptive and efficient swimming, taking into account controllability and energy efficiency, and improving propulsion efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention provides a bionic robotic fish jointly driven by active joints and passive joints. The present invention will be described below with reference to the accompanying drawings and embodiments.
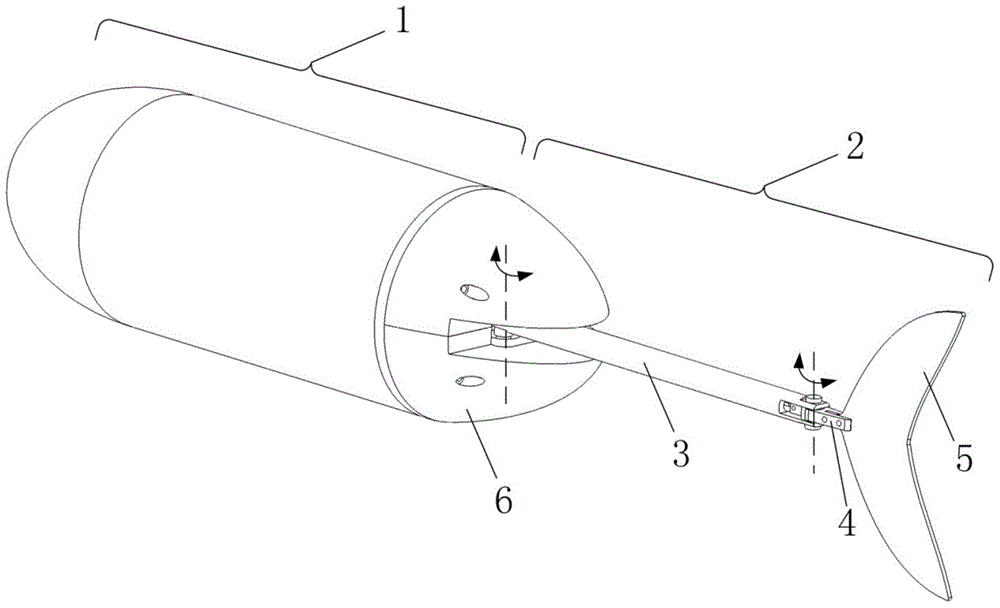
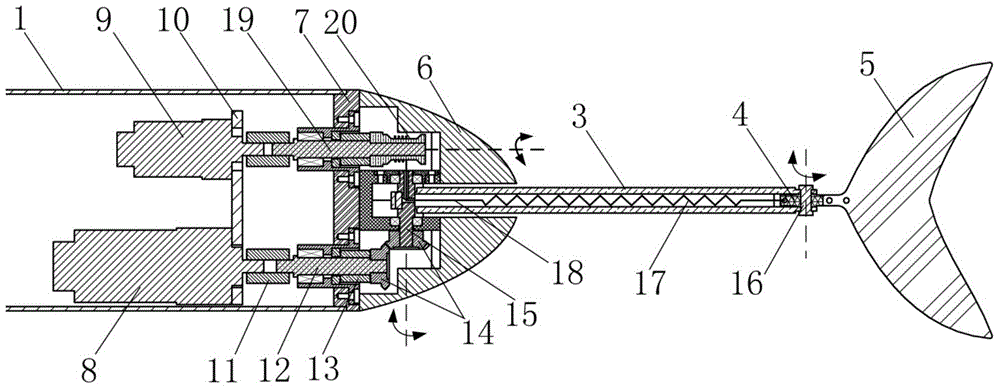
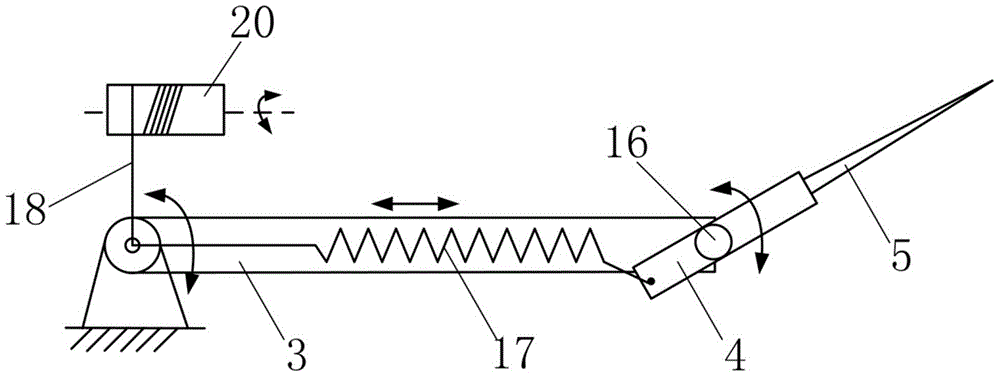
[0022] Such as figure 1 As shown, the main structure of the present invention is a sealed cabin body 1 and a tail fin propeller 2 . The airtight cabin body 1 is a rigid shell with a torpedo shape, and payloads such as motors, drivers, controllers, power supplies, and sensors are installed inside; the tail end of the airtight cabin body 1 is connected to the tail fin thruster 2, and the tail fin thruster 2 has two degrees of freedom Swing arm structure, in which the swing arm 3 drives the caudal fin 5 to perform a translational movement to produce the main water striking action, and the tail handle 4 drives the caudal fin 5 to perform a rotational movement to provide a suitable angle of attack for the water striking action. A fairing 6 is installed at the tail...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com