Wearable flexible tactile sensor for prosthetic hand and its tactile detection system
A tactile sensor and detection system technology, applied in instruments, measuring devices, etc., can solve the problems of inability to detect three-dimensional contact force and slip signal at the same time, and unreliable installation, and achieve the effect of simple structure, low processing cost, and easy production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
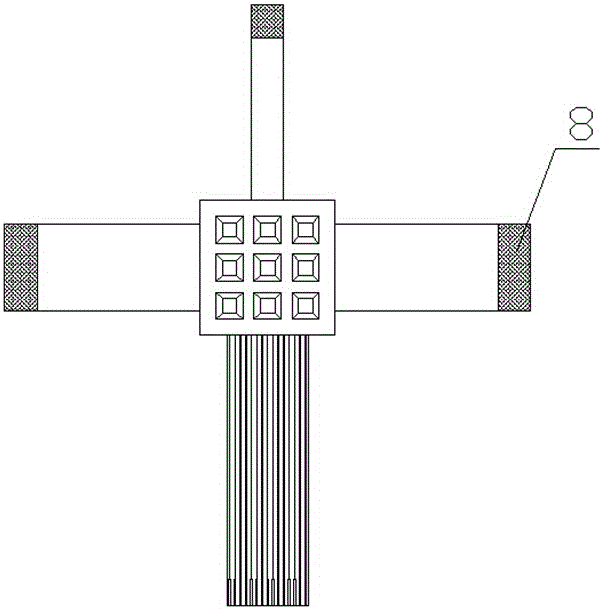
[0036] The tactile sensor of the present invention is as figure 1 Shown:
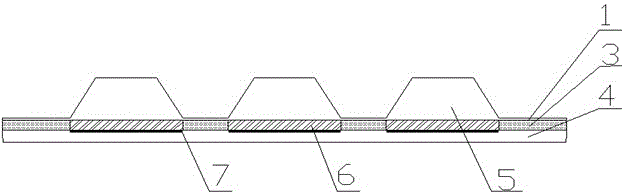
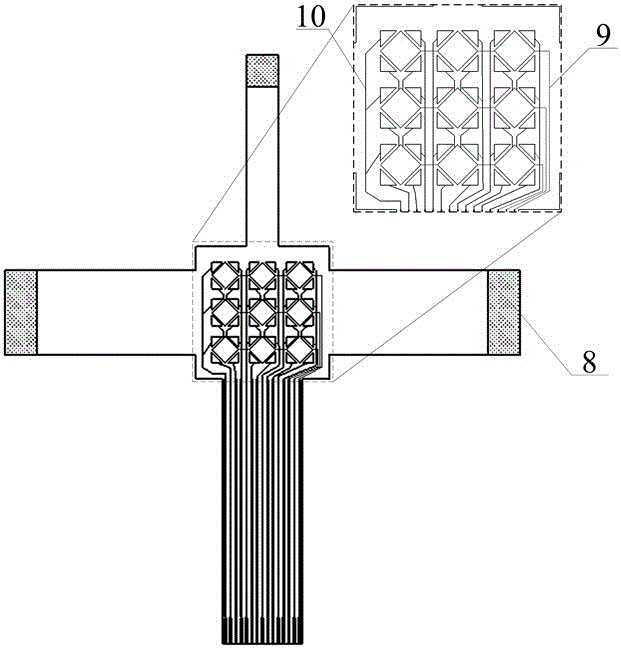
[0037] like figure 2 As shown, the present invention includes a flexible electrode layer 4, an intermediate layer and a PDMS raised layer 1 closely attached from bottom to top; image 3 As shown, the flexible electrode layer 4 is a flexible circuit board with a "ten" shape structure, the middle layer and the PDMS raised layer 1 are covered in the middle of the "cross", and the test electrode group 7 is covered in the middle of the "cross" shape and the lower stretching edge , the stretching edges on the upper side, left side and right side are provided with Velcro 8 for binding sensors, so that they can be securely worn on the surface of the intelligent prosthesis finger or on the support inside the intelligent prosthesis finger; as Figure 4 As shown, the middle layer includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com