Split lower limb wearing measuring device and following control method
A measuring device and follow-up control technology, applied in diagnostic recording/measurement, medical science, artificial legs, etc., can solve problems such as inability to realize the steering function, achieve the effect of being convenient and efficient to wear and use, and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings.
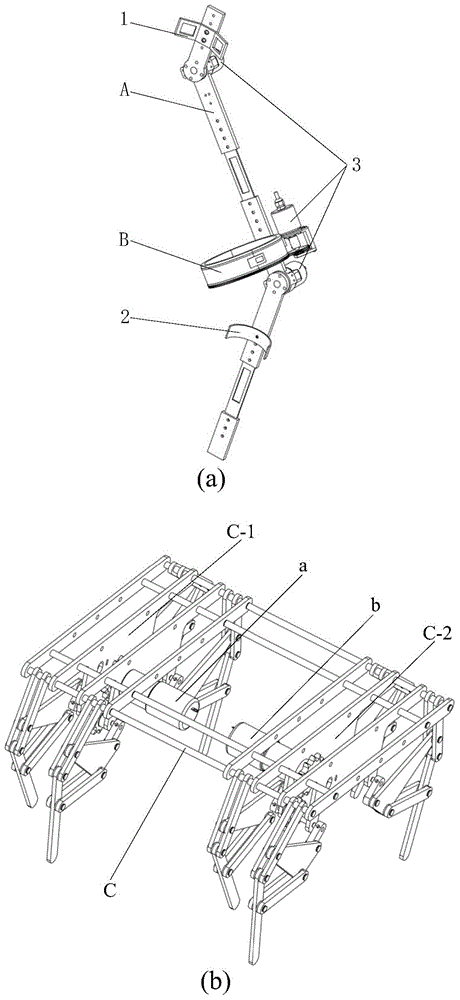
[0031] Such as figure 1 As shown in a, the split-type lower limb wearing measurement device and following control method include: a frontal axis measurement device A, a vertical axis measurement device B, a hip joint link 1 and a calf link 2 .
[0032] Such as figure 1 As shown in b, the walking platform C is composed of left quadruped C-1, right quadruped C-2, left motor a and right motor b; left motor a and right motor b are fixedly connected to left quadruped C-1 and right Quadruped C-2 Rack. The output shafts of the left motor a and the right motor b drive the crank to rotate for a full circle through a chain transmission; the left quadruped C-1 and the right quadruped C-2 are fixedly connected as a whole by four beams. The walking platform C realizes the differential steering movement of the whole machine through the rotational speed difference between the left...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com