A high-precision data fusion method for robust measurement of highly dynamic non-Gaussian models
A technology of data fusion and Gaussian model, which is applied in measurement devices, electrical digital data processing, special data processing applications, etc., and can solve the problems of reducing the number of model sets, reducing the calculation amount of probability transition matrix, and the large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with the accompanying drawings.
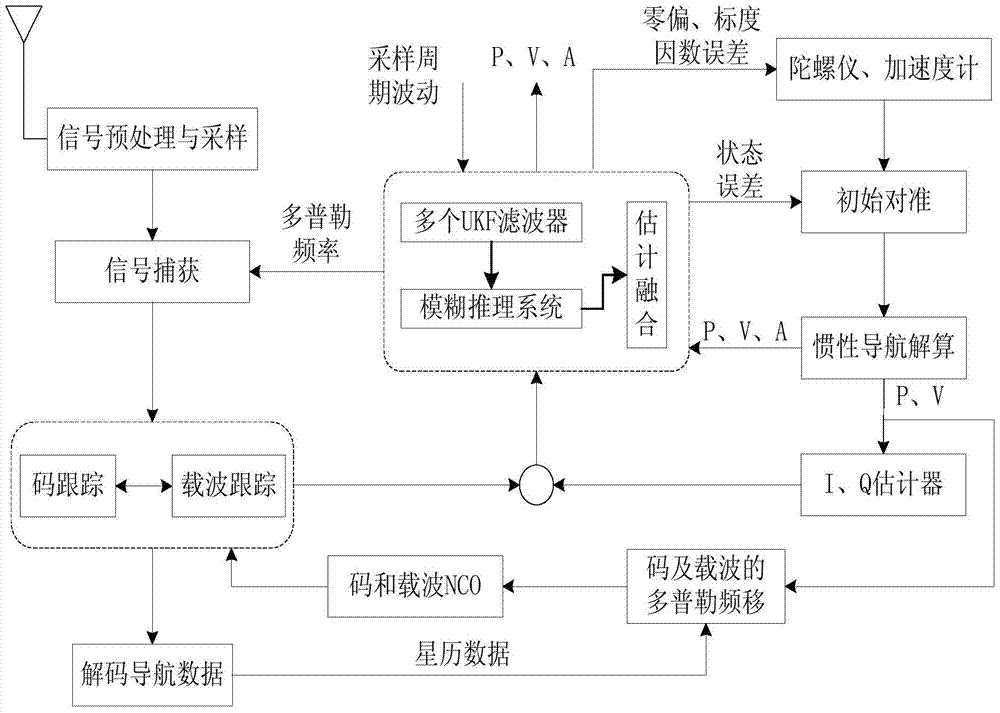
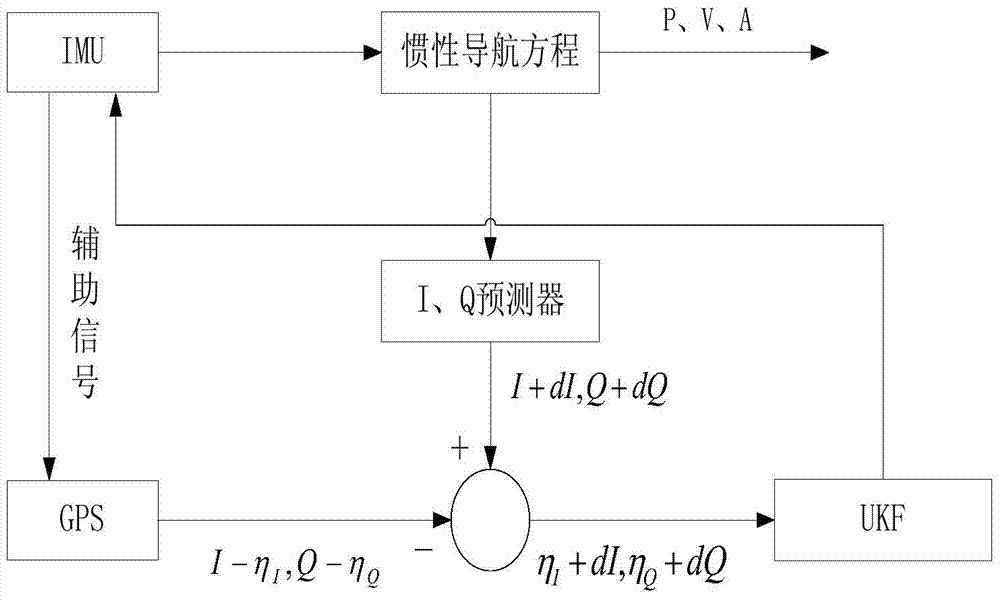
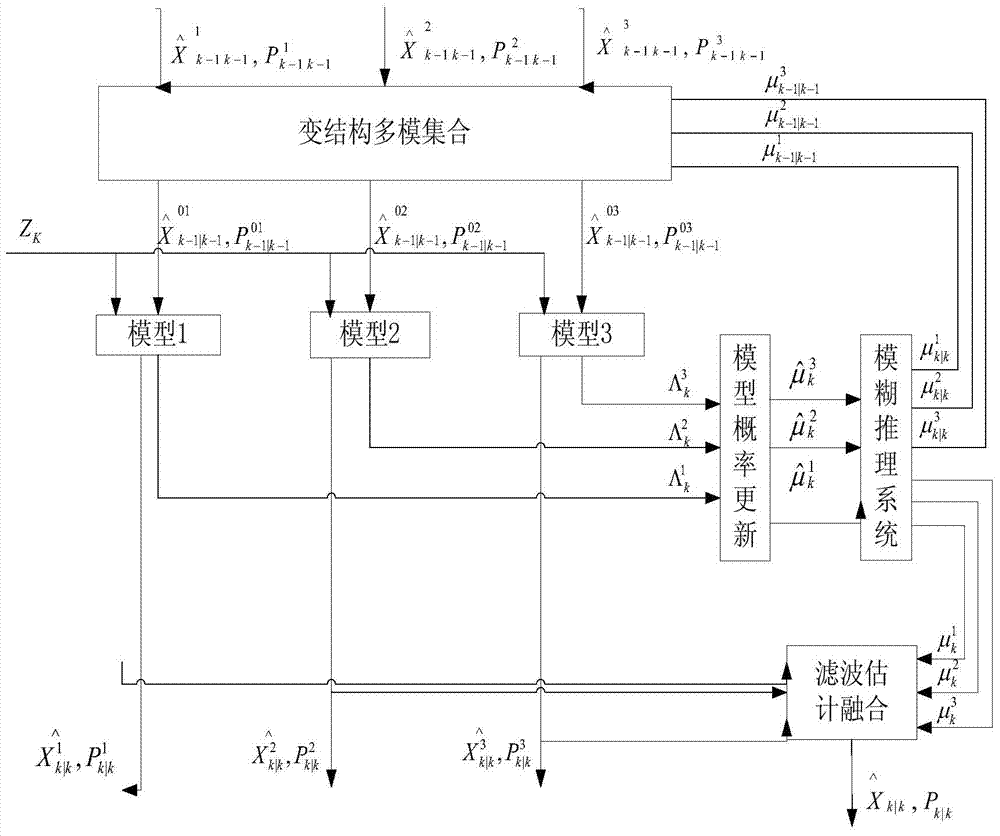
[0059] A high-precision data fusion method for robust measurement of high-dynamic non-Gaussian models. The hardware sensor sampling period fluctuation in the high-dynamic system is considered as the random uncertainty of the system, and a filtering model set is established according to its fluctuation range and trend. The model set includes more than one UKF filter model and fuzzy reasoning system; the UKF filter models are executed in parallel, and the probability of each UKF filter model matching the current high dynamic system state is calculated through Bayesian theorem, and each UKF filter model is updated in real time. The matching probability of a UKF filter model and the current high dynamic system, and the updated matching probability is used as the input of the fuzzy inference system, and the adaptive estimation probability of the UKF filter model probability ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com