Non-overshooting servo control method for aerial camera stabilization platform
A servo control and aerial camera technology, applied in the field of control, can solve problems such as fast switching and difficult balance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0071] The present invention will be further described in detail below in conjunction with the accompanying drawings and preferred embodiments.
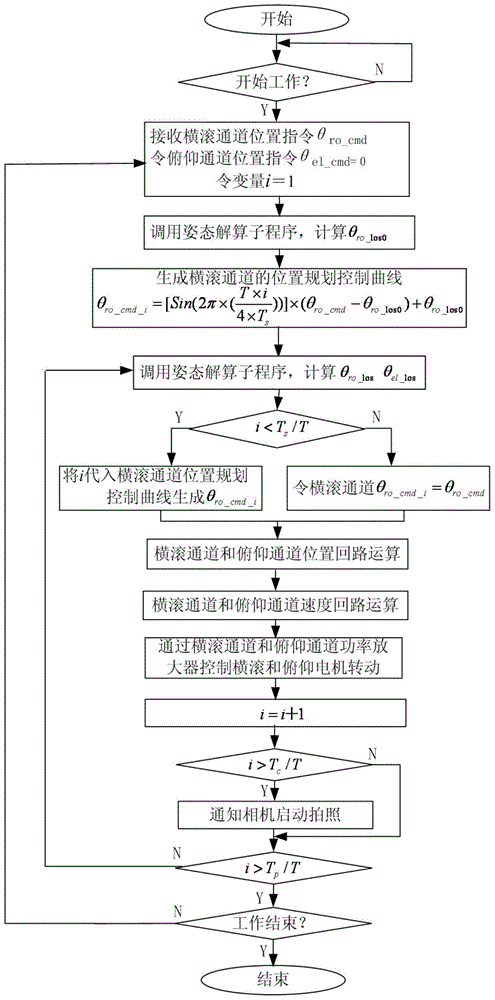
[0072] The non-overshoot servo control method provided by the preferred embodiment of the present invention is implemented on the servo control computer (DSP) of the aerial camera stabilization platform (hereinafter referred to as the stabilization platform). The stable platform includes a roll outer frame and a pitch inner frame structure. The roll outer frame is installed on the carrier, and the roll outer frame is equipped with a roll axis and a roll motor for driving the roll axis; the pitch inner frame is installed on the On the roller, the pitching inner frame has a pitching active shaft and a pitching passive shaft parallel to each other and a 2:1 angular transmission mechanism installed between them, the pitching motor drives the pitching active shaft to rotate, and the mirror is installed on the pitching passive shaft . The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com