Novel prosthetic hand without external power
A prosthetic hand and power technology, applied in the direction of artificial arms, etc., can solve the problems of high cost and price, complex structure, easy failure, etc., and achieve the effect of simple and reliable structure, simple operation and comfortable wearing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
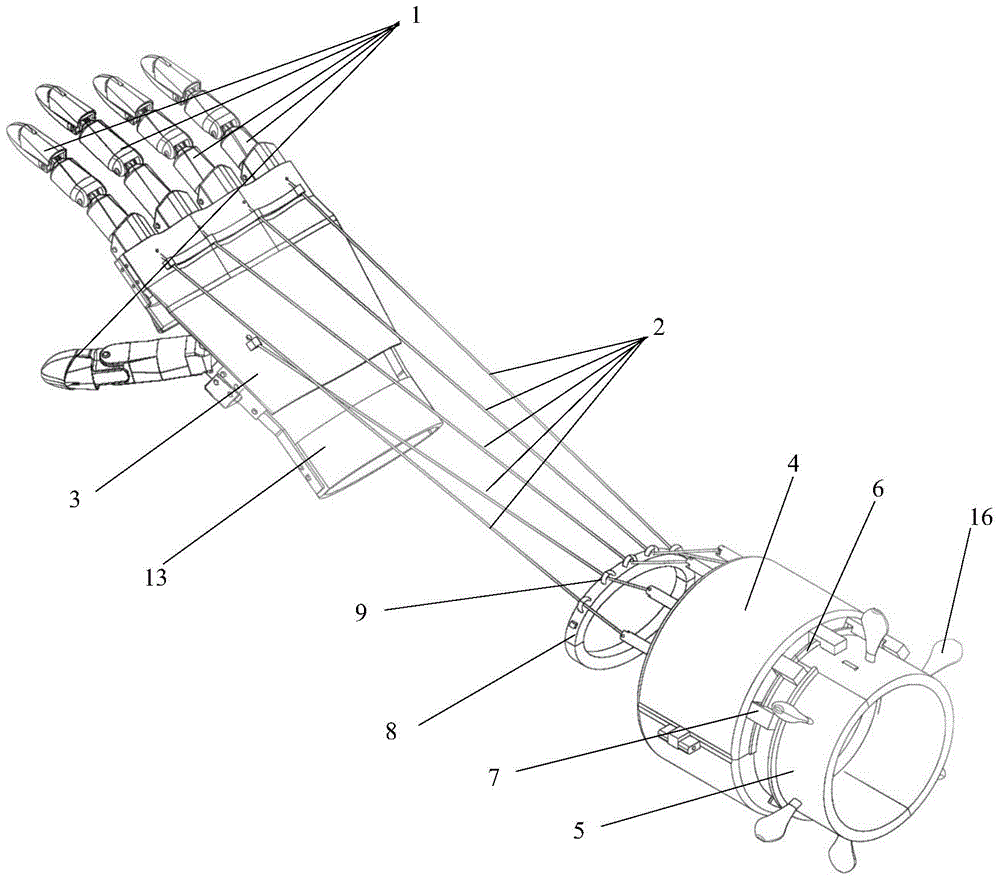
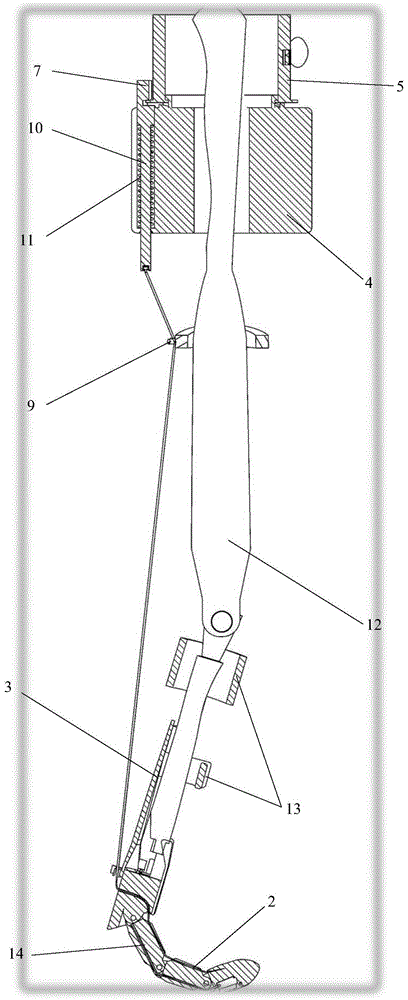
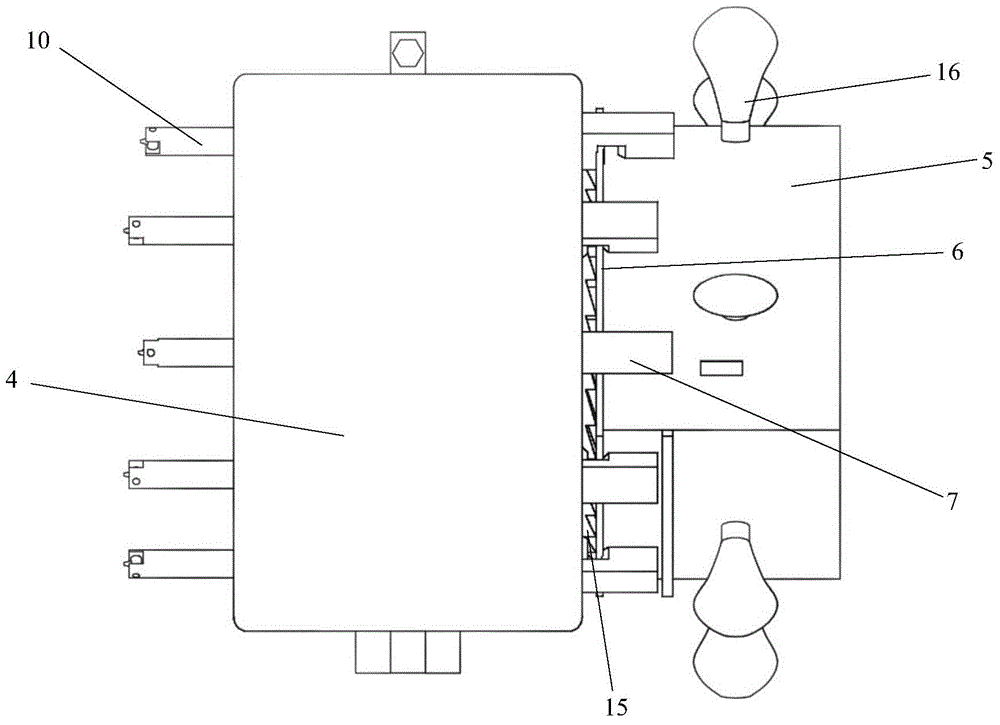
[0015] Below in conjunction with accompanying drawing and embodiment the present invention will be described in further detail: as Figure 1 ~ Figure 4 As shown, a new type of prosthetic hand without external power includes a mechanical finger 1, a palm fixer 3 and a selection mechanism; the mechanical finger 1 includes two or three knuckles, wherein the thumb is two knuckles, and the other fingers are It is three knuckles, the knuckles are hinged in turn, and the last knuckle is hinged on the palm holder 3. The lower part of the adjacent position between the knuckles is a beveled structure to ensure that each knuckle can bend smoothly. The inside of the lower part is provided with a backguy 2, one end of the backguy 2 is fixed inside the lower part of the first knuckle, and the bottom of the remaining one or two knuckles is provided with a through hole that allows the backguy 2 to pass through, and the other end of the backguy 2 Pass through the through hole of the knuckle an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com