Variable torque converter for under-actuated dexterous hand
A dexterous hand and variable technology, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems that the torque used for grabbing objects cannot be changed, the grabbing performance is unreliable, and there is no adjustability. Compact, reliable performance, and reduced volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
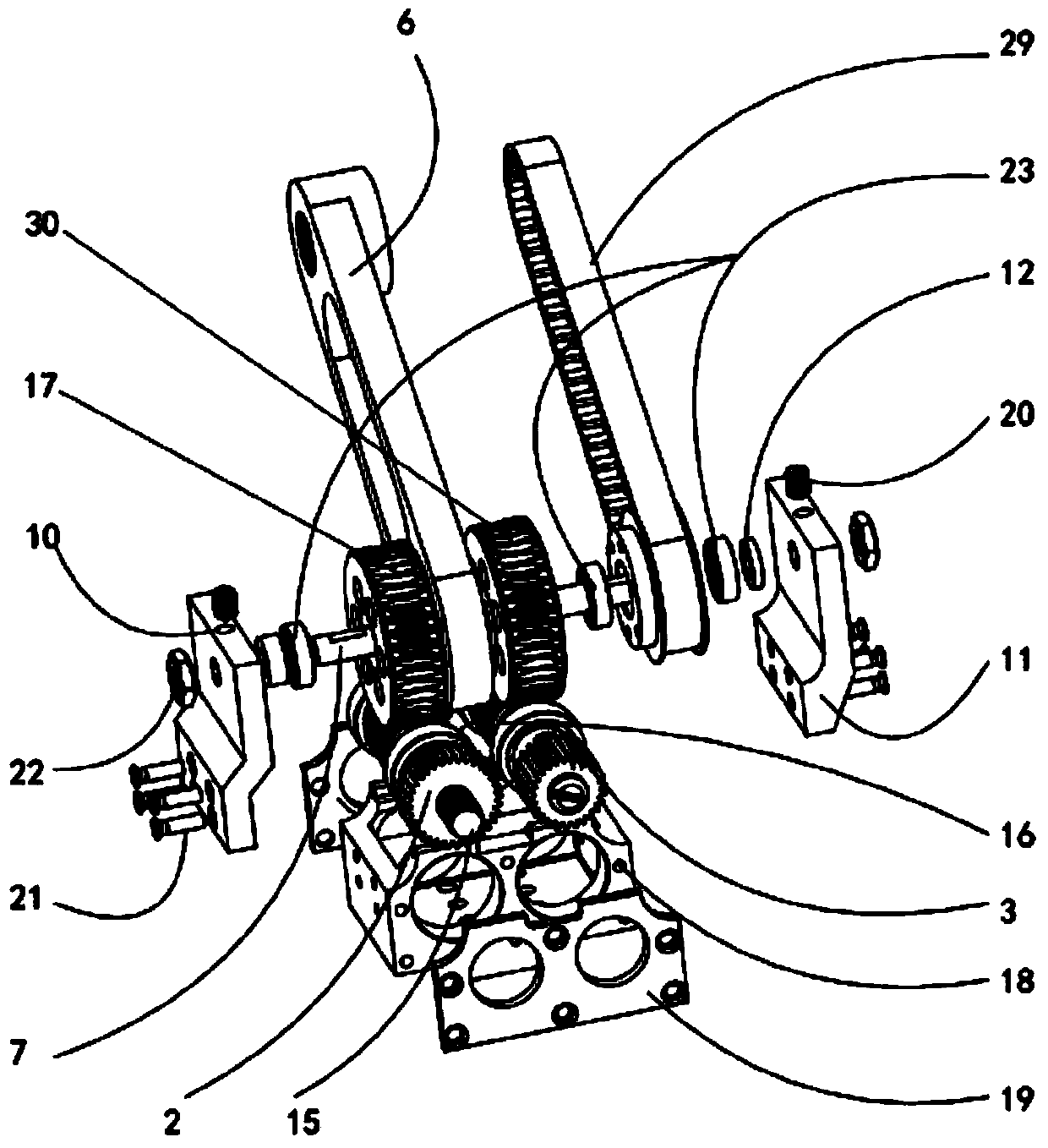
[0032] Embodiment: Under the action of the variable torque converter, there are two different movement situations for the fingers when the outer knuckle touches the object first or the inner knuckle touches the object first.
[0033] see Figure 6 , when the outer phalanx of the finger touches the object first, the working principle of the variable torque converter is shown in the figure. In the original state, the second gear 2 is in a tightened state on the inner worm shaft 15, and the compressed disk spring 27 exerts a thrust f on the second gear 2 0 , under the action of this thrust, a static frictional moment M is generated between the threaded hole of the second gear 2 and the threaded column of the inner worm shaft 15 0 . At the beginning of grasping, the finger motor drives the first gear 1 to rotate forward, and the first gear 1 receives the driving torque M 1 , the second gear 2 and the third gear 3 are respectively subjected to the torque M transmitted by the fir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com