Pose measurement of non-cooperative target based on full light field camera
A non-cooperative target and pose measurement technology, applied in the field of 3D vision target pose measurement, can solve problems such as short measurement distance, blurred target image, and large output image noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
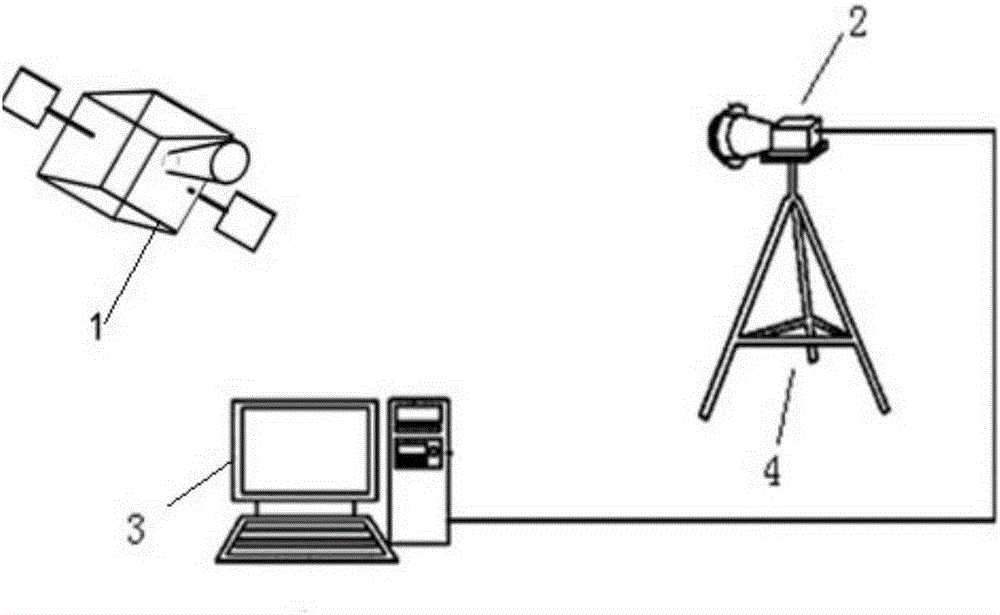
[0083] In this embodiment, a non-cooperative target pose measurement method based on a full light field camera is applied to a non-cooperative target pose measurement system based on a full light field camera, see figure 1 , the system consists of a non-cooperative target 1, a full optical field camera 2, a pose measurement data processing system PC 3, and a camera bracket 4 for fixedly installing the full optical field camera 2; the non-cooperative target 1 is located at the viewing angle of the full optical field camera 2 Within the range, the non-cooperative target contains the star-arrow docking ring; the star-arrow docking ring on the non-cooperative target is used as the identification object, and the star-arrow docking ring is a circle feature on the non-cooperative target;
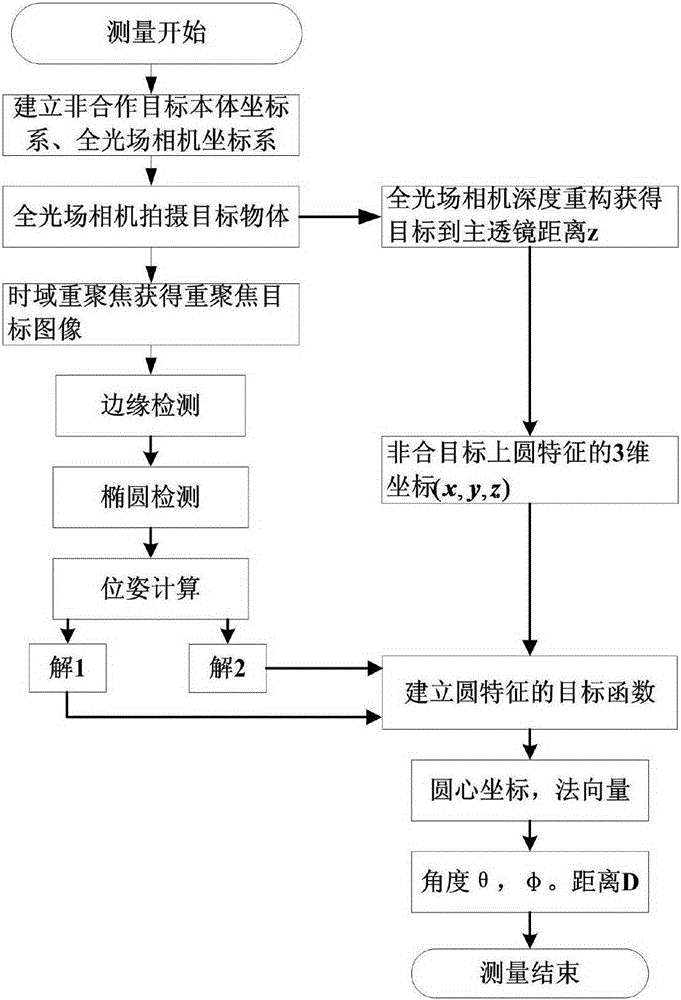
[0084] see figure 2 , the non-cooperative target pose measurement method based on the full light field camera is as follows:
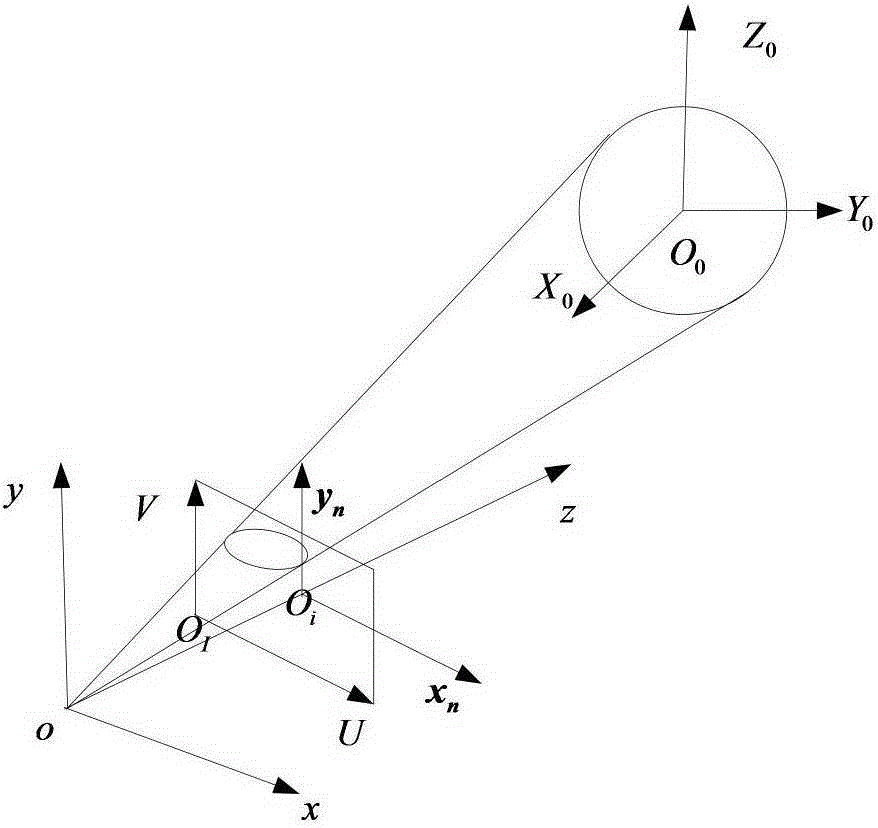
[0085] Step 1, such as image 3 As shown, take the center of the ci...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com