A roll optimization control method for flexible and agile satellite attitude maneuver
A satellite attitude and control method technology, applied in the field of satellite attitude control, can solve the problems of strong nonlinearity, difficulty in meeting control requirements, and easy vibration of flexible accessories.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
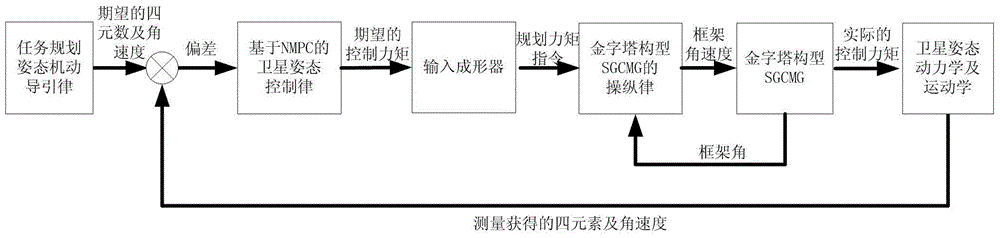
[0021] Specific implementation mode 1. Combination Figure 1 to Figure 4 Describe this embodiment, a flexible and agile satellite attitude maneuver rolling optimization control method, the method is implemented by the following steps:
[0022] Step A: Select the reference coordinate system, establish the attitude dynamics and kinematics equations of the satellite with flexible attachments using the pyramid configuration CMG group as the actuator, and establish the dynamic equations of the vibration of the flexible attachments in the modal coordinate system ; By defining a new state variable, establish a nonlinear state space equation for predicting the future information of satellite attitude;
[0023] Step B: According to the satellite attitude information measured at the current moment, the satellite attitude information in the predicted time domain is predicted through the discretized nonlinear state space equation, and the satellite attitude prediction output equation is e...
specific Embodiment approach 2
[0028] Specific embodiment two, combine Figure 1 to Figure 4 Describe this implementation mode, this implementation mode is an embodiment of a flexible and agile satellite attitude maneuver rolling optimization control method described in the first specific implementation mode, and its specific process is:
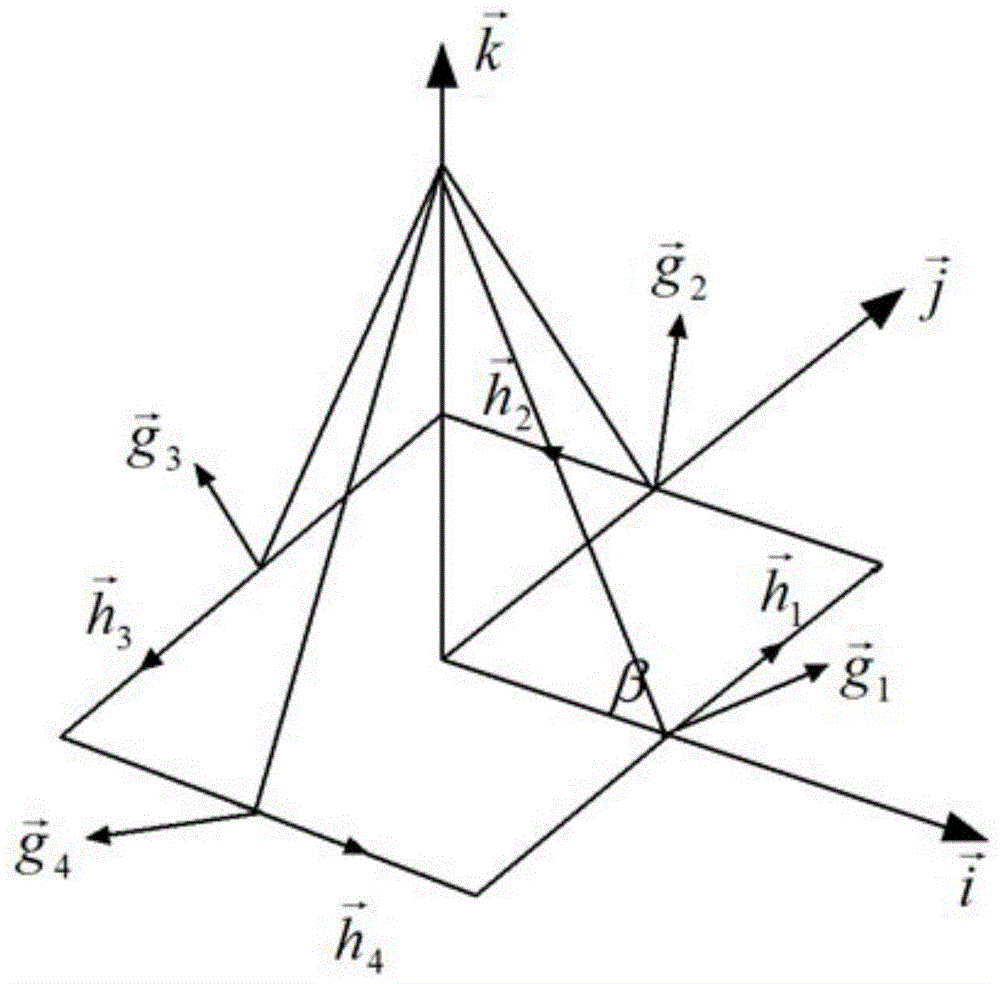
[0029] 1. Taking the inertial coordinate system as the reference coordinate system, the attitude dynamics of the satellite with flexible appendages with the pyramid configuration CMG group established as the actuator is:
[0030] J w · + δ T η ·· + [ w × ] J w + [ w × ] δ T η · = - H · ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com