Novel spherical robot and control method thereof
A technology of spherical robot and control method, which is applied in the direction of motor vehicles, transportation and packaging, etc., to achieve the effect of ensuring stability and simple and reliable control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] 1. Drive system structure
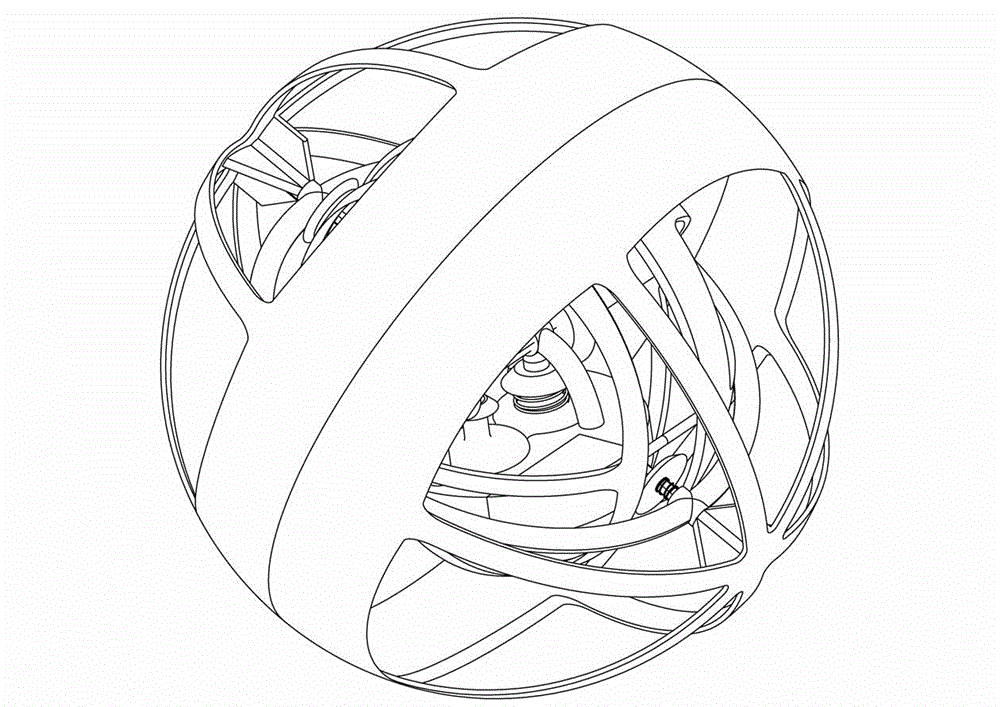
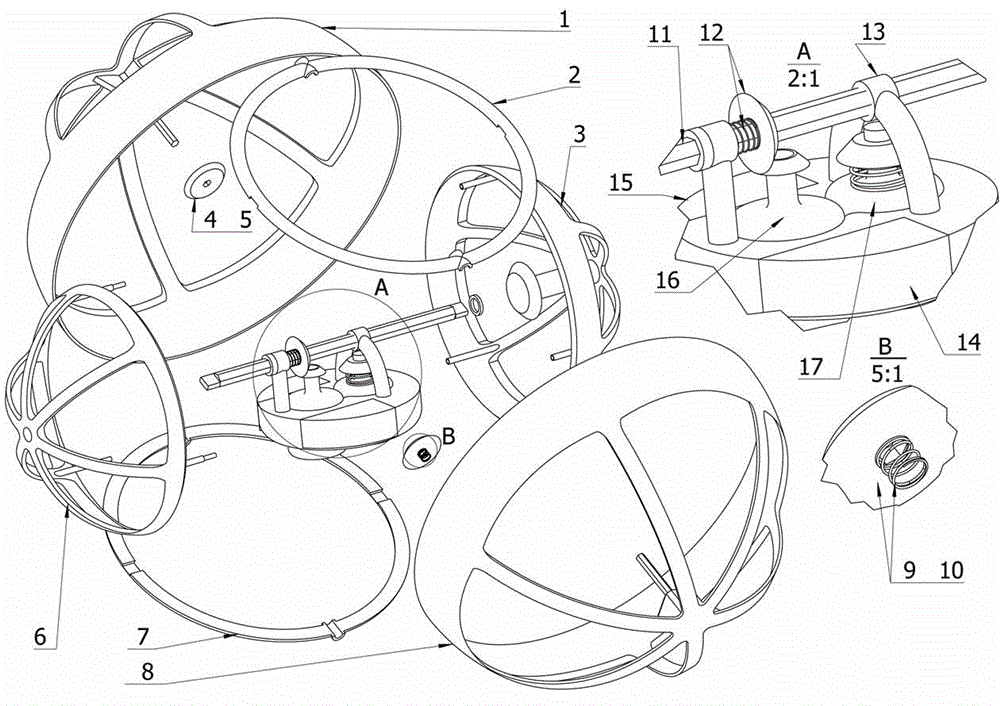
[0019] Such as figure 1 As shown, two spherical car shells 1, 8 are buckled into a spherical shape, and the steering motor 16, the driving motor 17, the carrying accessories 14, and the control circuit 15 are assembled on the carrying platform and the counterweight 13, and the carrying platform and the counterweight are empty sleeves on the steering wheel. On the shaft 11, it can freely rotate around the steering shaft 11 but cannot slide axially. The steering bevel gear 12 is sleeved on the steering shaft 11 and can slide. The power can be transmitted to the steering shaft 11 through the steering bevel 12. The output gear of the driving motor 17 meshes with the bevel gear fixedly connected to the center of the transmission wheel 3. The transmission wheels 3 and 6 are buckled into a whole and are vacantly sleeved on the steering shaft 11. 1. 4. Transmission bevel gear 2. 9 engagement transmission power. The two bogies 2, 7 and the steering...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com