Virtual automatic control experimental system and design method of virtual automatic control experimental system
An experimental system and experimental technology, applied in general control systems, control/regulation systems, simulators, etc., can solve problems such as unsmooth serial communication between hardware and software, aging of hardware experimental equipment, and large impact on experimental results. Achieve the effects of powerful image processing and display functions, convenient self-learning, and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
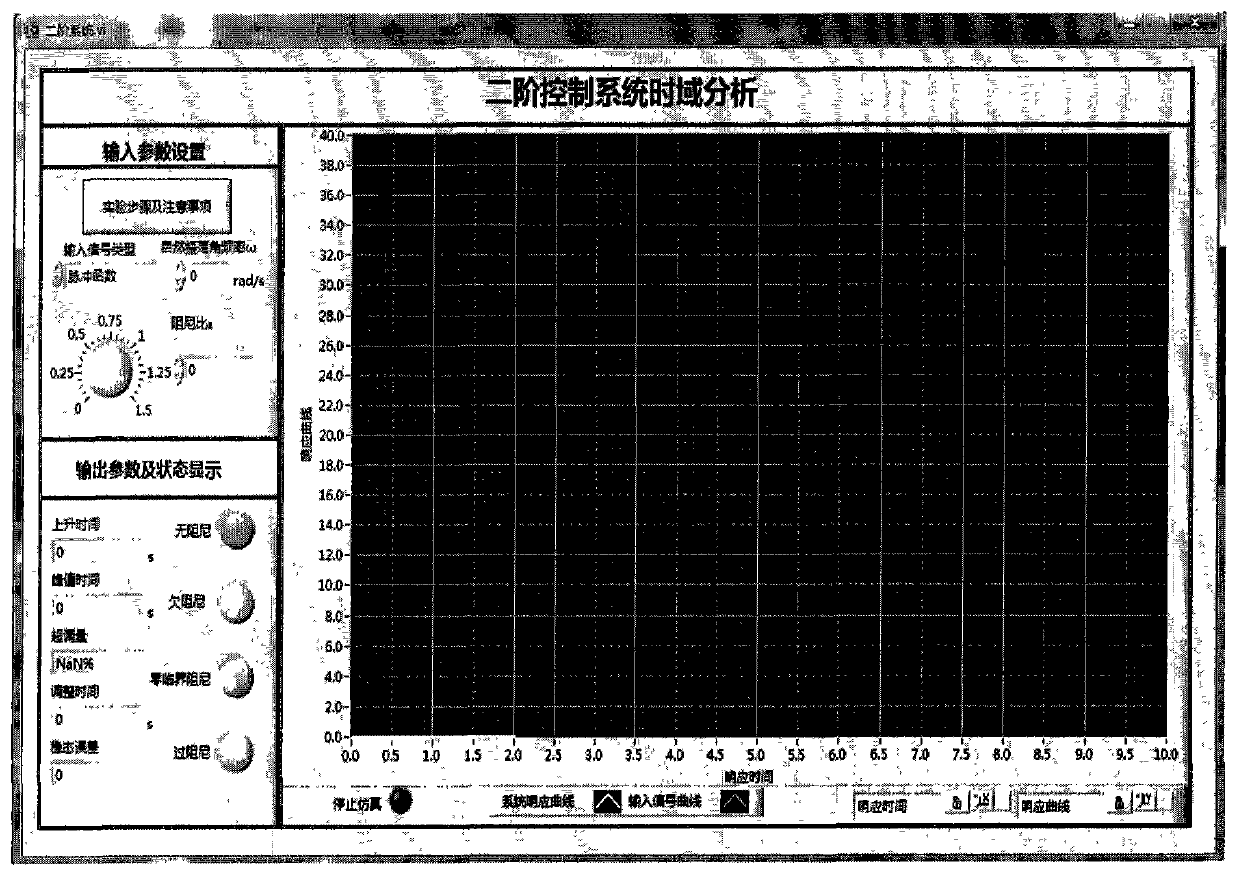
[0057] If the closed-loop transfer function of the second-order system is selected in the experiment Compare it with the standard second-order system closed-loop transfer function In comparison, it can be obtained that the damping ratio of the second-order system is 0.4, and the natural oscillation angular frequency is 5rad / s. The time-domain analysis of this second-order system can be carried out as follows:
[0058] Step 1. Open the virtual automatic control experiment system, select the second-order system in the menu bar, the interface is as follows figure 2 ;
[0059] Step 2. In the "Input Parameter Settings" module, click the "Experimental Steps and Precautions" button, and the front panel of the experimental steps will pop up for the experimenter to read, such as image 3 , after mastering the experimental steps and precautions, the experimenter can conduct system time-domain analysis under the action of various typical signals;
[0060] Step 3. There is an "Inpu...
Embodiment 2
[0067] If the open-loop transfer function is selected in the experiment: The root locus analysis of the fifth-order system can be carried out as follows:
[0068] 1. Open the virtual automatic control experiment system, select "root locus analysis" in the menu bar, the interface is as follows Figure 9 .
[0069] 2. Input the coefficients of the open-loop transfer function in the "numerator polynomial" and "denominator polynomial" modules. Since the root locus draws the distribution of closed-loop characteristic roots when a certain parameter of the open loop changes, this system takes the open-loop gain K as Change parameters, default K=1.
[0070] 3. Some characteristics and parameters of the root locus analysis are recorded in the experimental parameter module, including the number of the root locus, the number of asymptotes, the separation point and meeting point of the root locus, the intersection point of the asymptote and the real axis, The starting and ending angle...
Embodiment 3
[0074] If the oscillation link in the typical link is selected as the research object in the experiment, the time constant of the oscillation link is T = 1s, and the damping ratio ξ = 0.5. The frequency domain analysis of this typical link can be carried out according to the following steps:
[0075] 1. Open the virtual automatic control experiment system, select typical link analysis in the menu bar, the interface is as follows Figure 10 ;
[0076] 2. In the "Parameter Setting" module, click the "Experimental Procedures and Precautions" button, and the front panel of the experimental procedure will pop up for the experimenter to read. After mastering the experimental procedure and precautions, the experimenter can carry out various typical procedures. Frequency domain analysis;
[0077] 3. There is a button of "typical link type" in the "parameter setting" module, through which the experimenter can select a typical link. Typical links in frequency domain analysis include a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com