Particle filter-based improved RAIM (Receiver Autonomous Integrity Monitoring) anti-deception jamming method
A deceptive jamming and particle filtering technology, applied in radio wave measurement systems, satellite radio beacon positioning systems, measurement devices, etc., can solve the problem of ignoring residual vector correlation and similarity, to protect interests and ensure positioning accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
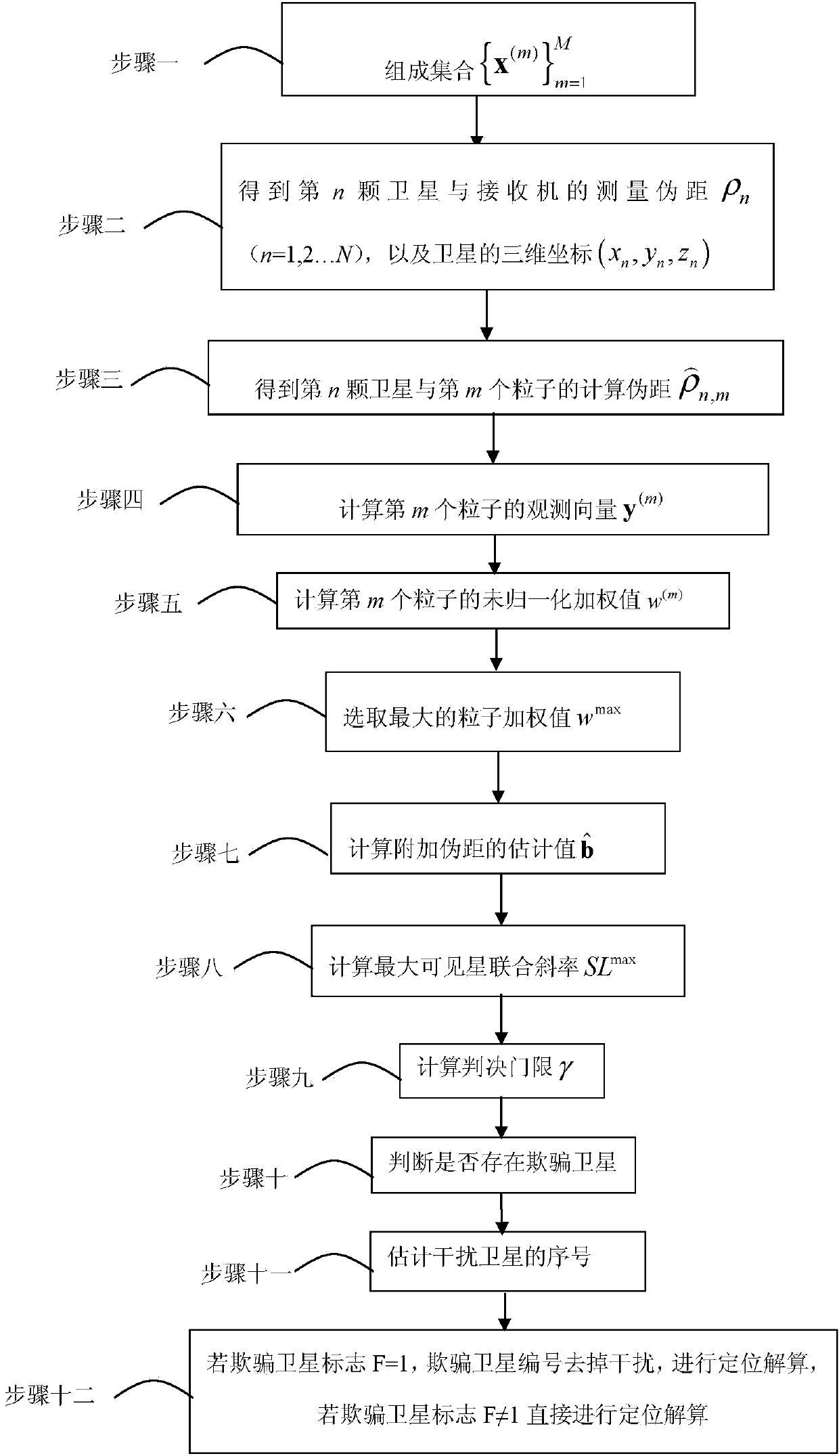
[0039] Specific Embodiment 1: An improved RAIM anti-spoofing interference method based on particle filter in this embodiment is specifically prepared according to the following steps:
[0040] Step 1. The estimated value of the receiver state is Indicates the estimated value of the receiver's three-dimensional coordinates, represents the estimated value of the receiver clock bias, in M particles are obtained in the neighborhood of , forming a set where x (m) =(x U,m ,y U,m ,z U,m ,δt U,m ) represents the mth receiver state particle, (x U,m ,y U,m ,z U,m ) represents the three-dimensional coordinates of the receiver, δt U,m Indicates receiver clock bias, m=1, 2....M;
[0041] Step 2. Set the number of currently visible satellites as N, measure the pseudo-range between each satellite and the receiver, and obtain the measured pseudo-range ρ between the nth satellite and the receiver n (n=1,2...N), and the three-dimensional coordinates of the satellite (x n ,y n ...
specific Embodiment approach 2
[0067] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the maximum observation vector y obtained according to step six in step seven max , to compute an estimate of the additional pseudorange for:
[0068] b ^ = ( S T S ) - 1 S T y max ,
[0069] where S=(I-G(G T G) -1 G T ), is the residual vector matrix, G represents the satellite unit direction vector matrix, obtained by the following formula:
[0070] G = 1 1 1 1 ...
specific Embodiment approach 3
[0072] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the estimated value of the additional pseudorange obtained according to step seven in step eight Calculate the maximum visible star joint slope SL max for:
[0073] SL max = max n 1 , n 2 , . . . , n Ns [ | | ( d max ) sub 1,2,3 | | | | ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com