Collapsible underactuated adaptive capture device
A self-adaptive, capture device technology, applied in the aerospace field, can solve the problem that the target does not have self-adaptive ability, and achieve the effect of saving payload space, reducing the number of motors, and facilitating promotion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
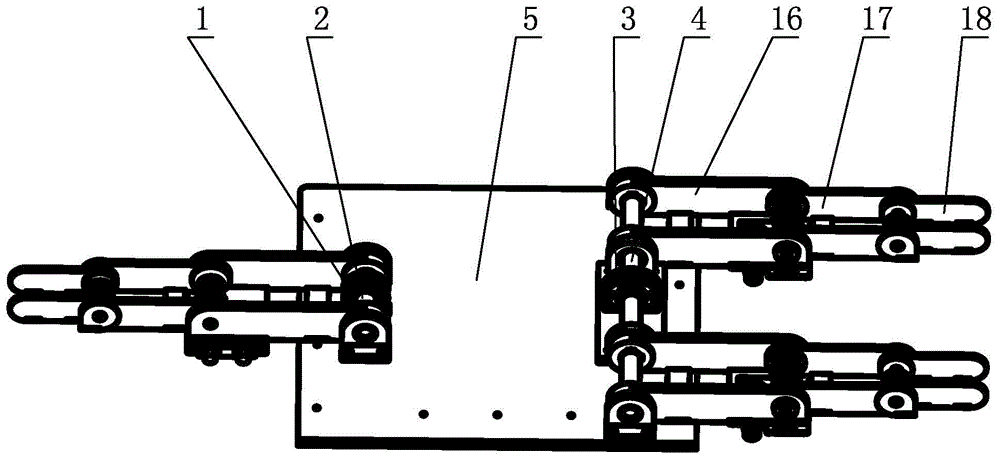
[0014] Specific implementation mode one: combine figure 1 with Figure 4 Describe this embodiment. The foldable underactuated adaptive capture device in this embodiment includes a first synchronous pulley 1, a joint shaft 2 at the base of a single finger, a first gear 3, a common joint shaft 4 at the base of two fingers, and a base plate 5 , the drive assembly, the second synchronous pulley 6, the first transmission shaft 7, the first bearing seat 8 and three finger mechanisms, the base plate 5 is a rectangular plate body, and the joint shaft 2 at the root of the single finger is installed on the upper surface of one end of the base plate 5, The joint shaft 4 shared by the roots of the two fingers is installed on the upper surface of the other end of the base plate 5, the drive assembly is installed on the lower surface of the base plate 5, and the first transmission shaft 7 is installed on the lower surface of the base plate 5 through the first bearing seat 8. And the first ...
specific Embodiment approach 2
[0015] Specific implementation mode two: combination Figure 4 Describe this embodiment, the drive assembly of the foldable under-actuated adaptive capture device in this embodiment includes a code disc 9, a first drive motor 10, a first reducer 11, a flange 12, and a third synchronous pulley 13 , the second gear 14 and the second transmission shaft 15, the code disc 9, the first drive motor 10, and the first reducer 11 are installed on the lower surface of the substrate 5 through the flange 12, and the code disc 9 is connected with the first drive motor 10 , the output shaft of the first driving motor 10 is connected with the second transmission shaft 15 through the first reducer 11, the third synchronous pulley 13 and the second gear 14 are sequentially set on the second transmission shaft 15, the second gear 14 and the second transmission shaft A gear 3 meshes, and the third synchronous pulley 13 is connected with the second synchronous pulley 6 through a synchronous belt. ...
specific Embodiment approach 3
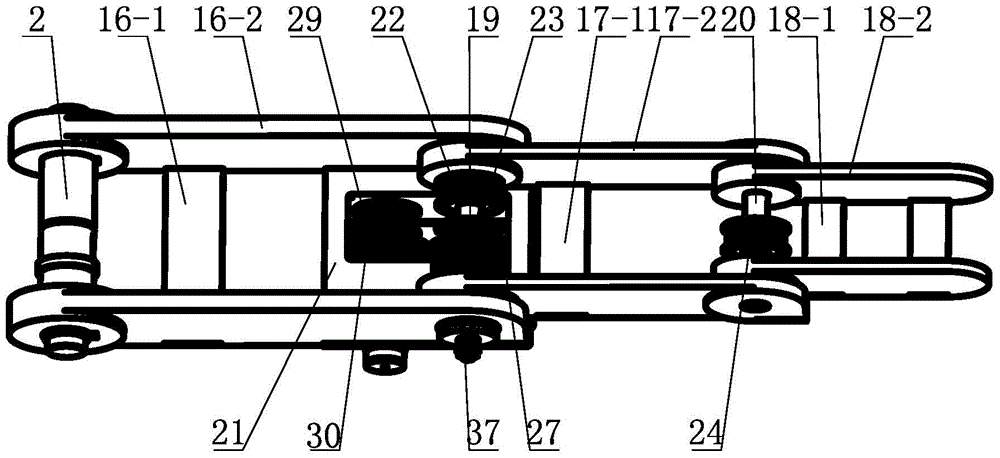
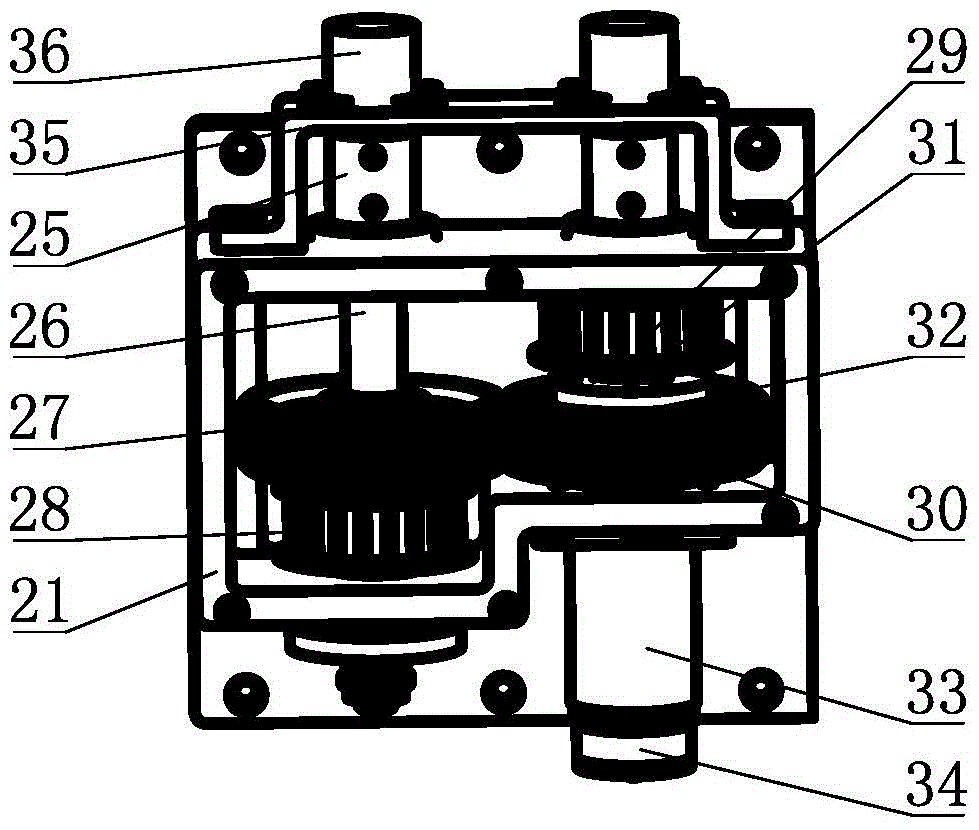
[0017] Specific implementation mode three: combination figure 2 with image 3 To illustrate this embodiment, each finger mechanism of the foldable underactuated adaptive capture device in this embodiment includes an underactuated mechanism, a root finger segment assembly 16, a middle finger segment assembly 17, a top finger segment assembly 18, Middle knuckle shaft 19, top knuckle shaft 20, underactuated frame 21, fourth synchronous pulley 22, fifth synchronous pulley 23 and sixth synchronous pulley 24, one end of the root finger assembly 16 passes through the middle The finger joint shaft 19 is connected to one end of the middle finger assembly 17, and the other end of the middle finger assembly 17 is connected to one end of the top finger assembly 18 through the top finger joint shaft 20, and the underactuation mechanism passes through the underactuation frame 21 is installed at one end of the root finger assembly 16, the fourth synchronous pulley 22 is supported on the mi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com