A multi-platform point cloud data fusion method
A technology of point cloud data and fusion method, which is applied in the fields of surveying, mapping and engineering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
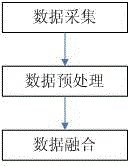
[0062]figure 1 A schematic flow diagram of the multi-platform point cloud data fusion method provided in this embodiment, as shown in the figure, the method is as follows:
[0063] S1 data collection: Obtain three-dimensional data of ground objects and landforms in the target area through data collection equipment set up on different platforms, and obtain raw data with different precision, density and orientation;
[0064] S2 data preprocessing: Preprocessing the collected raw data respectively to obtain the preprocessed point cloud data;
[0065] S3 data fusion: compare the accuracy of the preprocessed point cloud data, and based on the point cloud data with higher accuracy, correct and analyze the data with lower accuracy, obtain the point cloud data conversion model, and perform correction and fusion.
[0066] Such as image 3 As shown, a multi-platform point cloud data fusion method, wherein the specific steps of data collection are:
[0067] S1.1) Preparation before col...
Embodiment 2
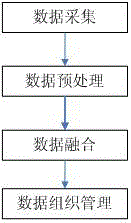
[0123] figure 2 A schematic flow diagram of the multi-platform point cloud data fusion method provided in this embodiment, as shown in the figure, the method is as follows:
[0124] S1 data collection: Obtain three-dimensional data of ground objects and landforms in the target area through data collection equipment set up on different platforms, and obtain raw data with different precision, density and orientation;
[0125] S2 data preprocessing: Preprocessing the collected raw data respectively to obtain the preprocessed point cloud data;
[0126] S3 data fusion: compare the accuracy of the preprocessed point cloud data, and based on the point cloud data with higher accuracy, correct and analyze the data with lower accuracy, obtain the point cloud data conversion model, and perform corrective fusion;
[0127] S4 data organization and management: extract key points from the fused point cloud data, and carry out engineering organization and management of key points.
[0128]...
Embodiment 3
[0201] figure 2 A schematic flow diagram of the multi-platform point cloud data fusion method provided in this embodiment, as shown in the figure, the method is as follows:
[0202] S1 data collection: Obtain three-dimensional data of ground objects and topography in the target area through data collection equipment set up on different platforms, and obtain raw data of different precision, density and orientation;
[0203] S2 data preprocessing: Preprocessing the collected raw data respectively to obtain the preprocessed point cloud data;
[0204] S3 data fusion: compare the accuracy of the preprocessed point cloud data, and based on the point cloud data with higher accuracy, correct and analyze the data with lower accuracy, obtain the point cloud data conversion model, and perform corrective fusion;
[0205] S4 data organization and management: extract key points from the fused point cloud data, and carry out engineering organization and management of key points.
[0206] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com