Real-time lane line detection method
A lane line detection and lane line technology, applied in the field of computer vision, to shorten the processing time, improve the accuracy, and achieve the effect of stable detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to conveniently describe the content of the present invention, the following terms are first explained:
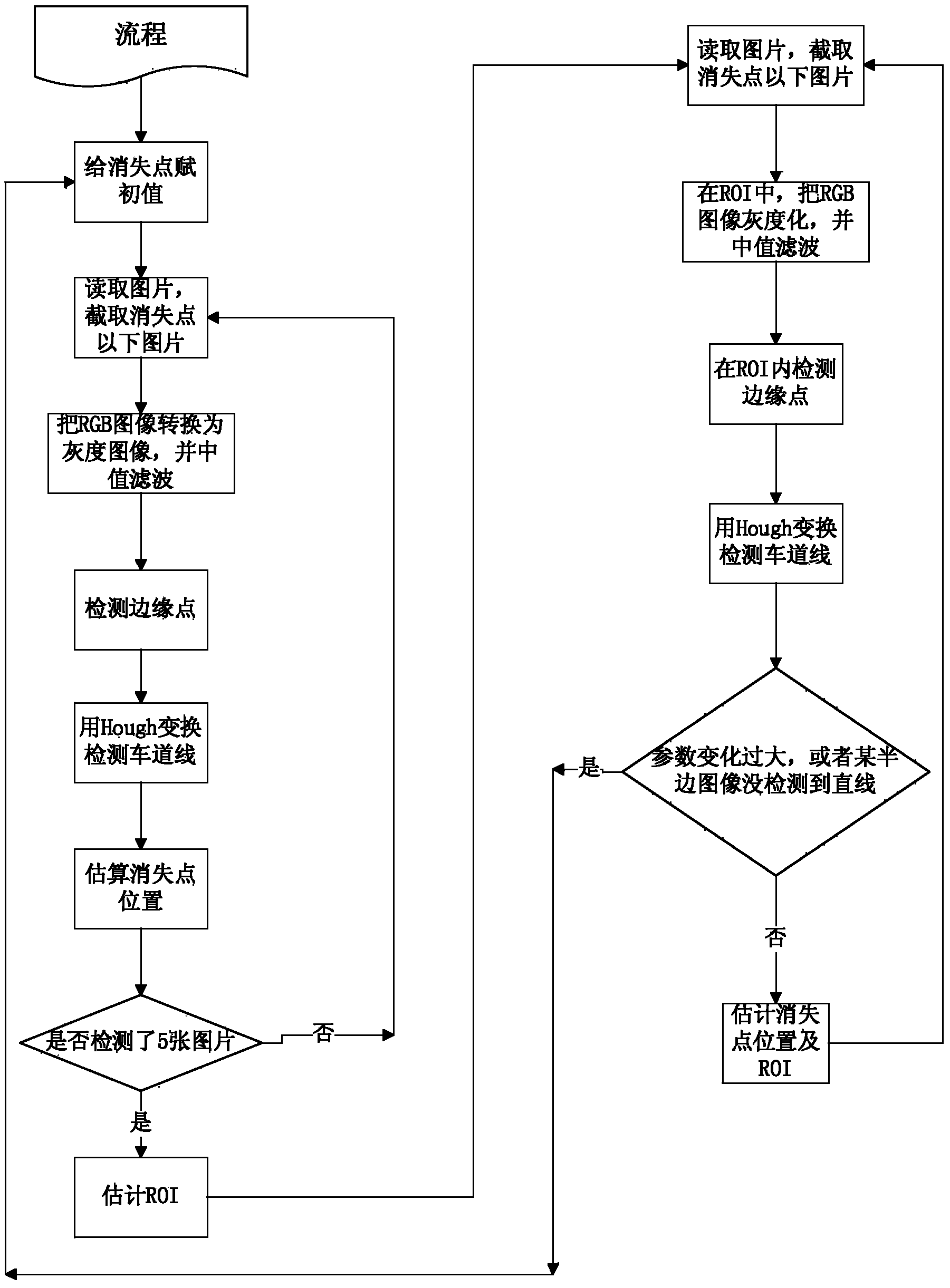
[0022] Vanishing point: In the 3D real world, all parallel straight lines on the same plane will intersect with the same point when reflected in a 2D image. The lane line and lane edge line on the straight lane are parallel to nearsight and reflected in the lane image. These straight lines will intersect at a point, which is defined as the vanishing point.
[0023] Hough transform: Hough transform is a method used to detect straight lines in pictures in image processing. Hough transform was proposed by Paul Hough in 1962. The basic idea of Hough transform is to use the point-line duality, that is, the collinear points in the image space correspond to the lines that intersect in the parameter space. Conversely, all straight lines that intersect the same point in the parameter space are in the image space. Contributing points correspond to it.
[0024] In the im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com