Hand rubbing bionic mechanism
A two-handed, frame-based technology, applied to mechanical equipment, belts/chains/gears, transmissions, etc., can solve problems such as high cost, high cost, complex structure, etc., and achieve high work reliability, widely popularized and used, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
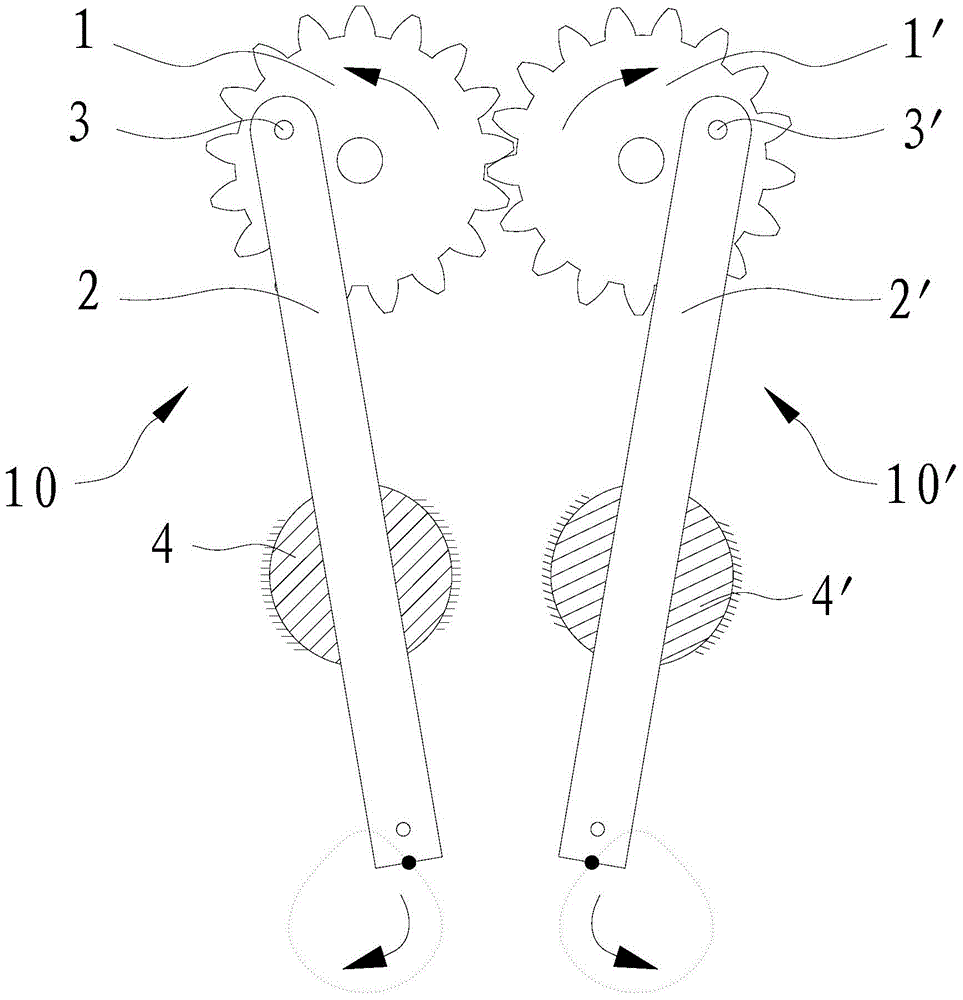
[0023] Refer to the bionic mechanism for hands rubbing shown in Figure 1, including a frame (not shown in the figure), and two sets of rubbing components 10, 10' arranged on the frame.
[0024] The kneading assembly 10 includes a gear 1 which is rotatably arranged on the frame around the axis, a connecting rod 2 which is rotatably arranged on the gear 1 through a pin shaft 3, and is hinged on the frame and can rotate around its own axis. Cylinder 4 . There is an eccentric pin hole on the gear 1, the center line of the pin hole is parallel to the axis line of the gear 1, one end of the pin shaft 3 is connected to the upper part of the connecting rod 2, and the other end is rotatably passed through the above pin hole middle.
[0025] The axis line of the cylinder 4 is parallel to the axis line of the gear 1. The cylinder 4 is provided with a radially penetrating through hole. The lower end is exposed outside the through hole. A plane low pair is formed between the connecting ...
Embodiment 2
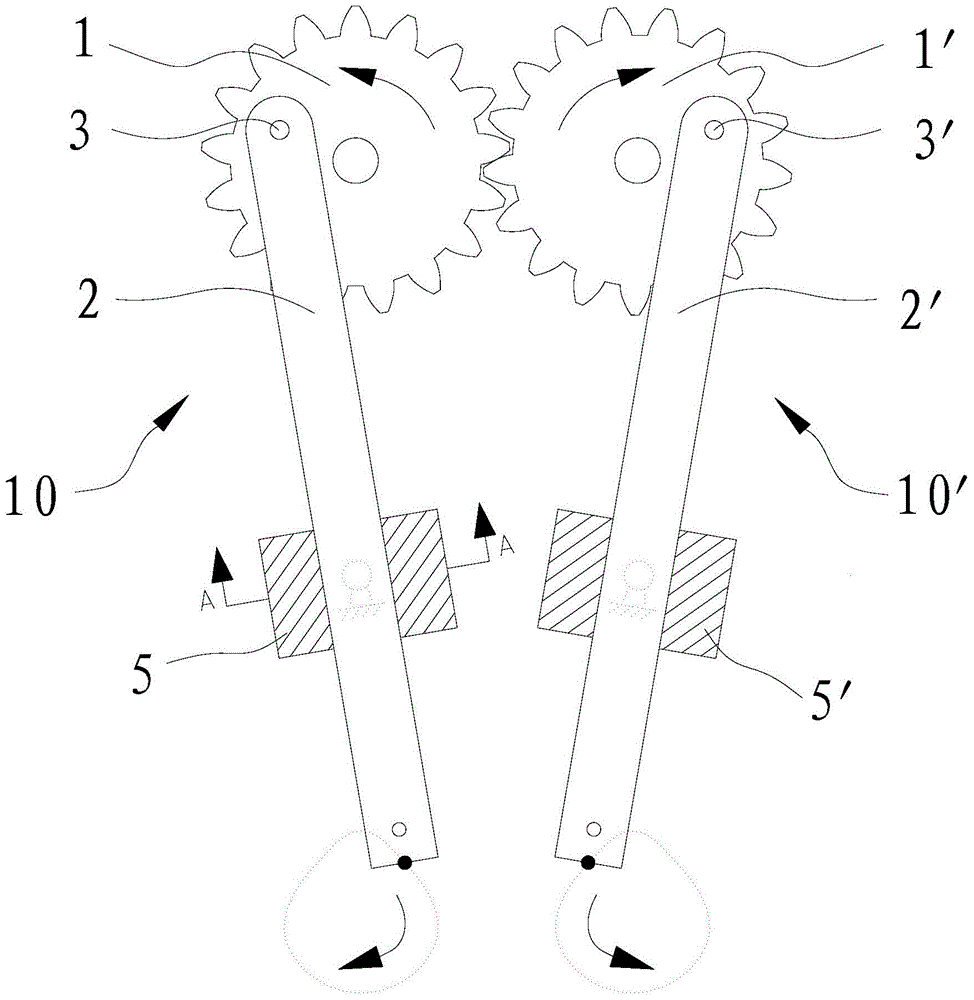
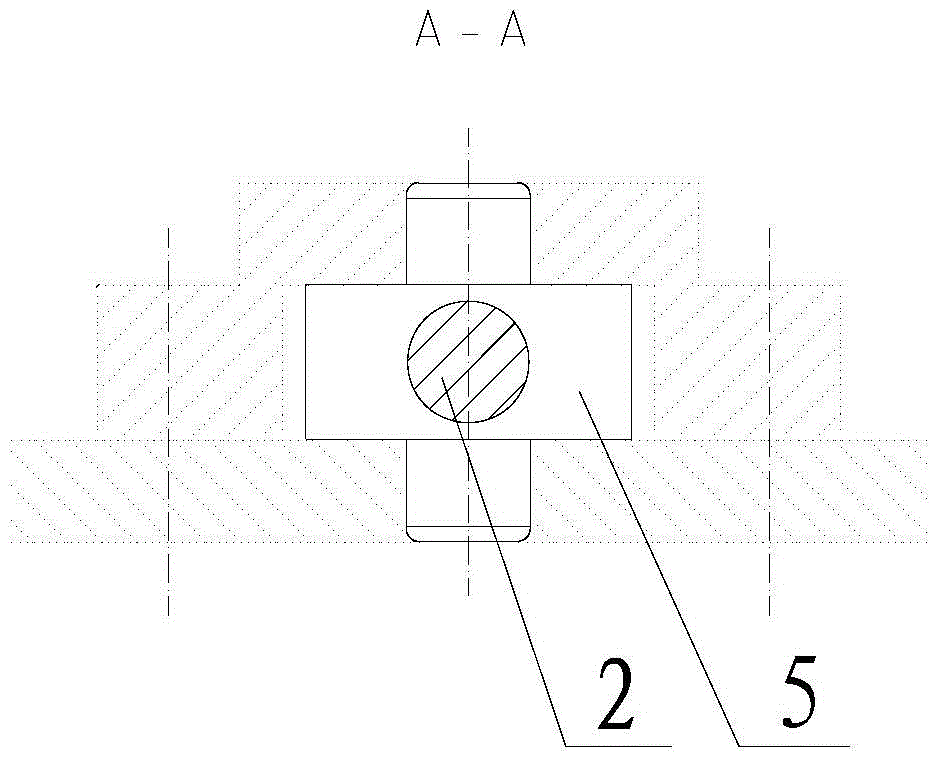
[0033] Referring to the hands-rubbing bionic mechanism shown in Figure 2, the difference between this bionic mechanism and Embodiment 1 lies in the setting of the components that provide the guidance of the connecting rod 2, 2'. In this embodiment, the components that provide the guides of the connecting rods 2 and 2' are centered on the sliding seats 5 and 5' that are hinged on the frame, that is, the centers of the two shaft ends of the sliding seats 5 and 5' are respectively hinged on the frame , the line connecting the hinge points of the two shaft ends of the sliding seat 5, 5' is parallel to the axis line of the gear 1, 1'. The sliding seats 5 and 5' are respectively provided with through holes for the connecting rods 2 and 2' to pass through. 2, 2' and sliding seat 5, 5' form a plane low pair, when the external drive mechanism drives one of the gears 1 and 1' to rotate, the connecting rods 2, 2' act on the pin shafts 3, 3' respectively Relative to the sliding seats 5 a...
Embodiment 1
[0035]To sum up, how to innovatively design a mechanism that imitates rubbing hands with fewer or the least moving components has always been a technical problem in the field of mechanics, because as a mechanism, fewer moving components not only means simple structure and manufacturing The cost is low, and more importantly, it means that the work reliability is high. In the two technical solutions of Example 1 and Example 2, for a single kneading assembly 10 (10'), there are only three substantial moving components in the kinematic sense, namely the gear 1 (1'), the connecting rod 2 (2'), cylinder 4 (4') or sliding seat 5 (5') hinged on the frame at the center. The innovative point of the present invention is that it realizes the complex planar motion imitating the rubbing of human hands with fewer mechanical components. Its structure is extremely simple, the cost is particularly low, and its work reliability is high, which can meet the needs of different industries for rubbin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com