Control method for artificial limb knee and ankle joints
A control method and technology for knee joints, applied in the field of prosthetic knee joints, can solve problems such as gait incoordination, prosthesis easily damaged wearer's energy consumption, etc., achieve natural gait, good gait following characteristics, and overcome gait incoordination Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
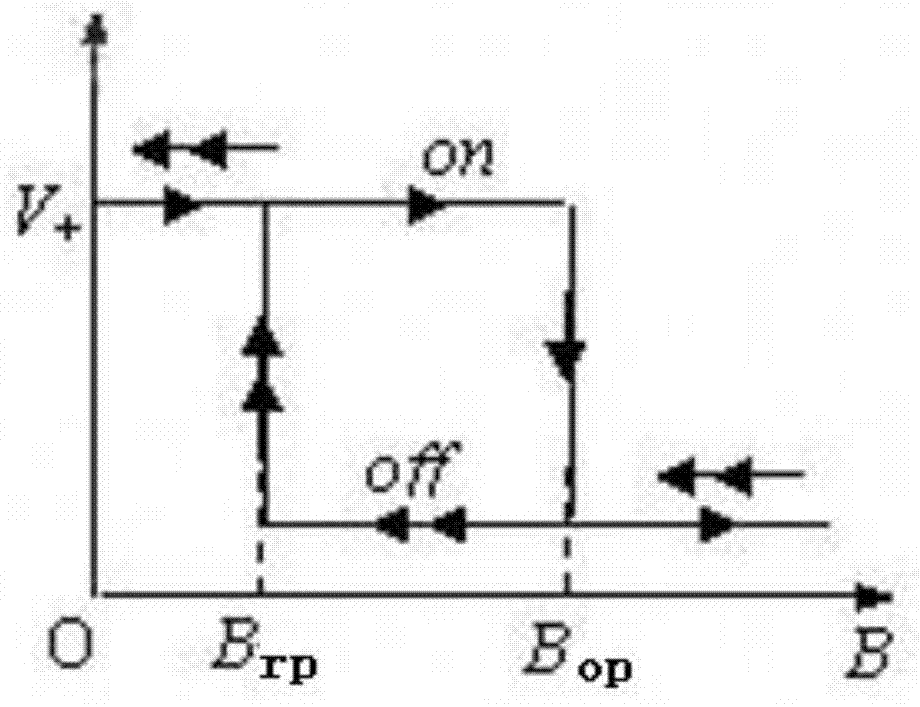
[0065] The model of the Hall sensor used in this embodiment is EST248, and the circuit of the controller is shown in Figure 8 , the model of the pressure sensor is FSR402, and the model of the angle sensor is RDC50.
[0066] The steps of this embodiment are as follows:
[0067] The first step is to identify the gait
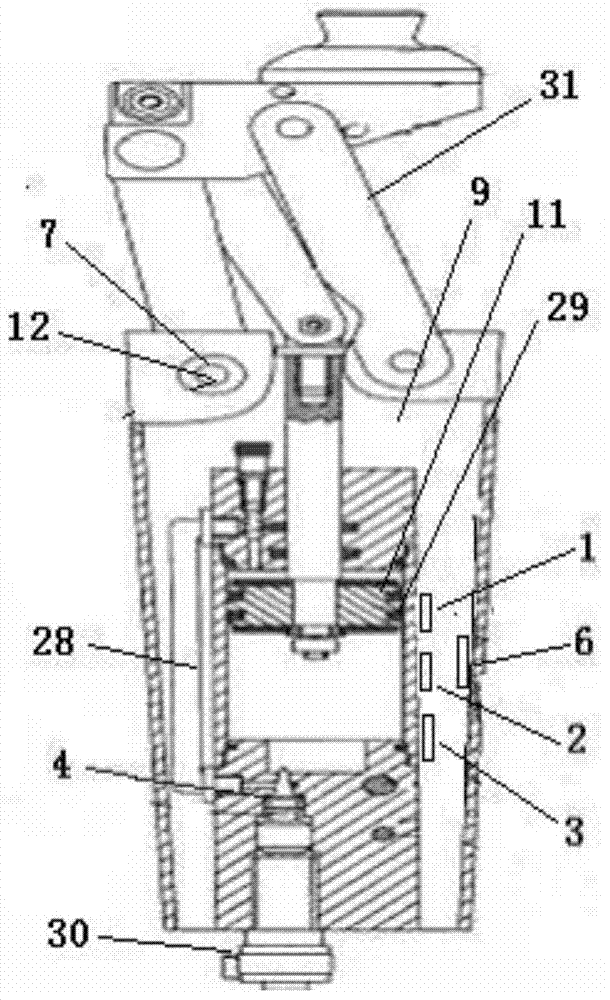
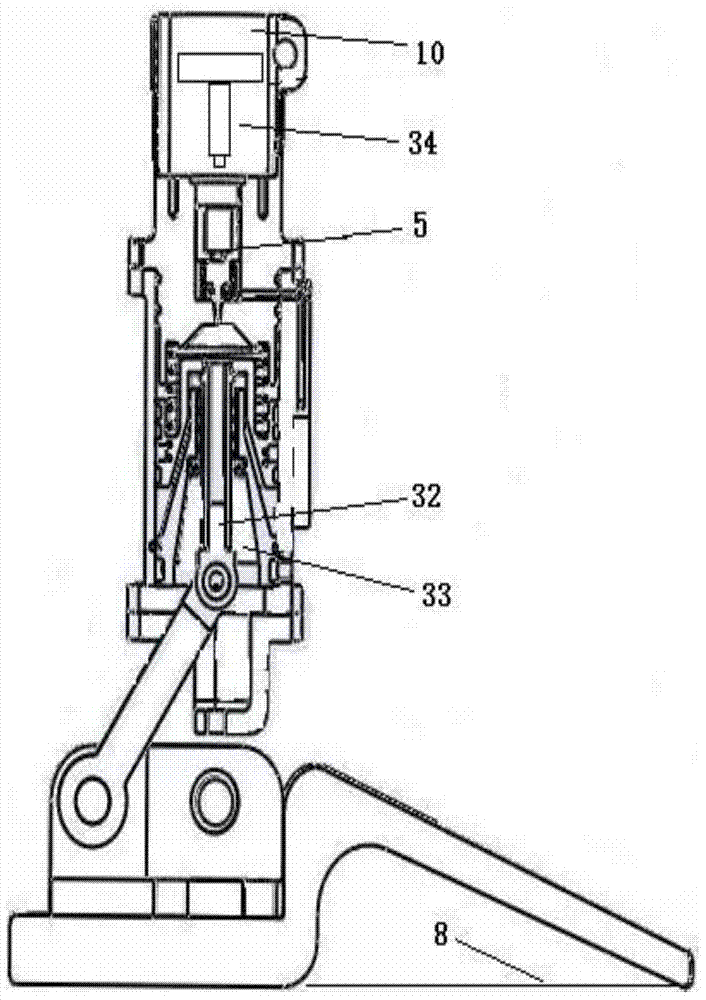
[0068] In the prosthetic knee joint composed of the knee joint needle valve 4, the controller 6, the knee joint piston 11, the knee joint cylinder body 28, the magnet 29 embedded in the knee joint piston, the knee joint motor 30, and the four-bar linkage mechanism 31 Install the Hall sensor on the 9 to identify the gait, the method is: determine the position of installing the Hall sensor on the prosthetic knee joint 9 through experiments, and install three Hall sensors, the specific operation steps are: put the prosthetic knee The position of the knee joint piston 11 when the joint 9 is fully extended is used as the locked position of the knee joint 9, where t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com