A Distributed Motion Control System for a Legged Walking Robot
A technology of motion control system and walking robot, applied in general control system, control/adjustment system, computer control, etc., can solve the problems of low real-time performance and low reliability, achieve good real-time performance and reliability, and realize real-time Effects of data communication, efficient path planning, and precise control of joint motion in real time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be specifically introduced below in conjunction with the accompanying drawings and specific embodiments.
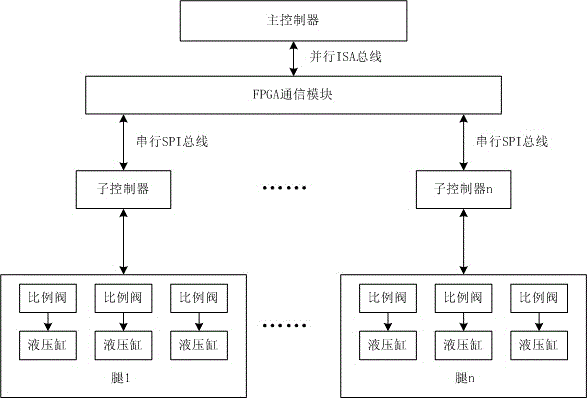
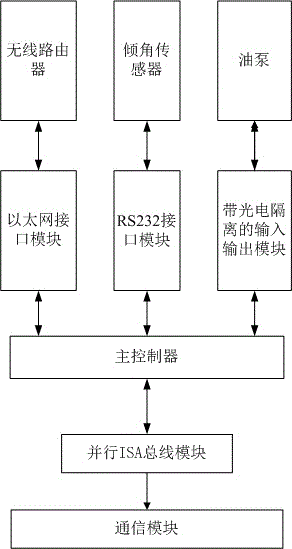
[0022] refer to figure 1 As shown, a distributed motion control system of a legged walking robot includes: a communication module, a main controller and multiple sub-controllers; the main controller is connected to the communication module, and the communication module is connected to each sub-controller respectively. The present invention adopts a plurality of independent sub-controllers, and each sub-controller can be used to control a sub-system, and data exchange is performed between the sub-controllers and the main controller through a communication module. The footed walking robot of the present invention has multiple legs, each sub-controller is used to realize the motion parameter acquisition of one leg and the speed and position control of each degree of freedom motion, and the main controller is used to complete the robot's over...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com