Binocular vision stereo matching method
A technology of stereo matching and binocular vision, which is applied in image data processing, instruments, calculations, etc., can solve the problems of low matching accuracy, slow computing speed, poor imaging quality of left and right view radiation changes, etc., and achieve high stereo matching accuracy, algorithm fast effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
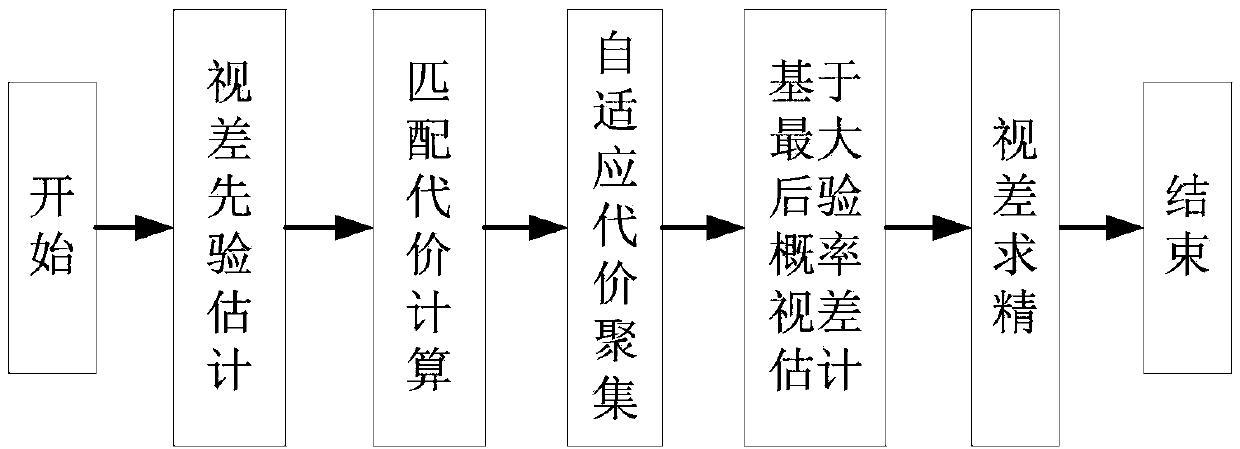
[0031] Such as figure 1 As shown, the process of the method of the present invention is to firstly perform disparity prior estimation based on the dense feature description method for the points to be matched in the view group, and then use the Hamming distance method to calculate the matching cost between the candidate matching points in the view group, Then use the cost aggregation method based on the adaptive window to obtain the cost aggregation value of the candidate matching points, and then use the disparity estimation method based on the maximum a posteriori probability model to calculate the disparity value of each pixel in the view group, and finally compare the stereo matching results Perform refinement.
[0032] figure 2 with image 3 Left view and right view in view group 1 respectively figure 1 , the two views were taken under the same conditions. Figure 4 is the right view in viewgroup 1 figure 2 , this view is the same as the right view figure 1 In com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com