An inertial positioning method and system using visual aid correction
An inertial positioning and visual technology, applied in the field of inertial positioning, can solve the problems of incorrect positioning and orientation information, inconvenient impact experience, etc., and achieve the effects of short correction time, accurate correction and low power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
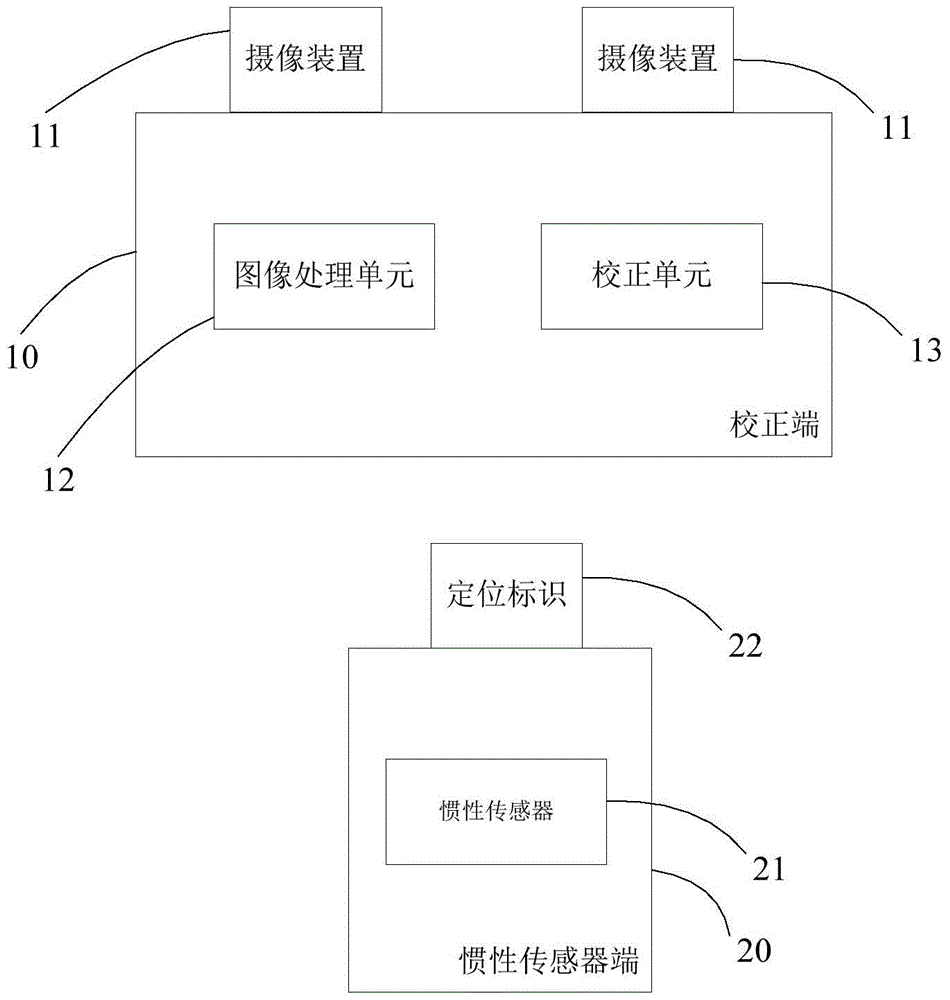
[0063] In the inertial positioning method and system using visual aid correction of the present invention, a separate camera module and a positioning mark are set; wherein, the camera module is set at the correction end, and the positioning mark is set at the inertial sensor end, or the positioning mark is set at the correction end, And the camera module is arranged at the end of the inertial sensor. Then, use the camera module to shoot the positioning mark, and calculate the correction data according to the shooting result; use the correction data to correct the sensing data of the inertial sensor, and can realize the inertial sensor in the inertial positioning device under the condition of consuming little power. erro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com