Binocular vision navigation system and method based on inspection robot in transformer substation
An inspection robot and binocular vision technology, applied in the field of binocular vision navigation system, can solve the problems such as the inability to plan the walking path of the substation inspection robot, the inability to effectively avoid obstacles, and the error of obstacle detection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0062] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
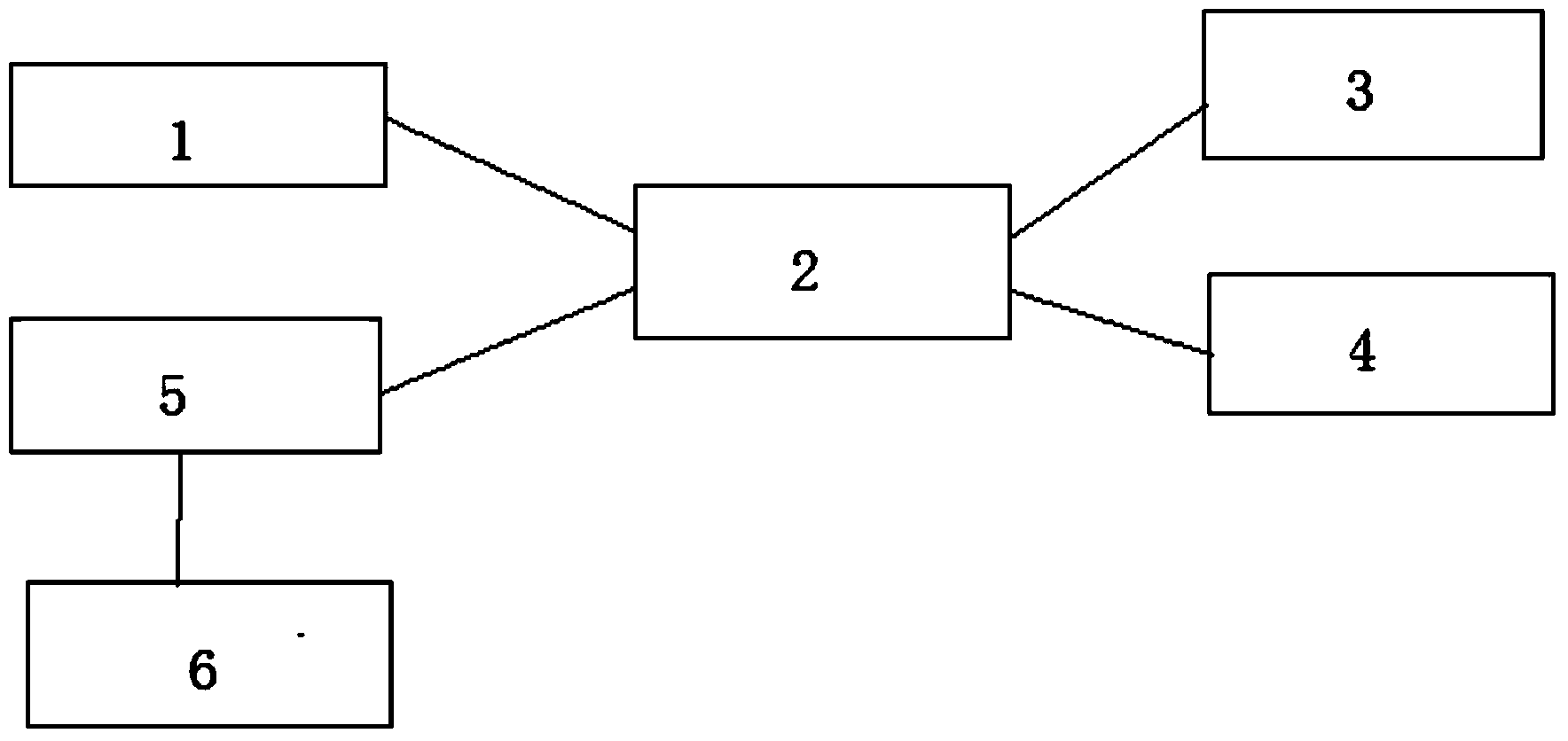
[0063] like figure 1 As shown, a binocular vision navigation system based on substation inspection robot, which includes a robot body, and an image acquisition system 1 for collecting environmental information maps on the road ahead is provided at the end of the forearm of the robot body;
[0064] Image acquisition system 1: Image acquisition system 1 collects environmental images on the road ahead of the robot, and then uploads the collected images to visual analysis system 3 through network transmission system 2. Image acquisition system 1 includes binocular cameras, and binocular cameras pass through the transmission line Connect to the image acquisition card, and then connect to the network transmission system 2 by wire;
[0065] The network transmission system 2 includes a wireless network bridge, a wireless router, and a receiver, and transmits t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com