Asymmetric four-rotor UAV (unmanned aerial vehicle) and control method thereof
A quadrotor unmanned aerial vehicle, asymmetric technology, applied in the aerospace field, can solve problems such as loss of lift, poor maneuverability of the aircraft, and shortened flight time of the aircraft
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
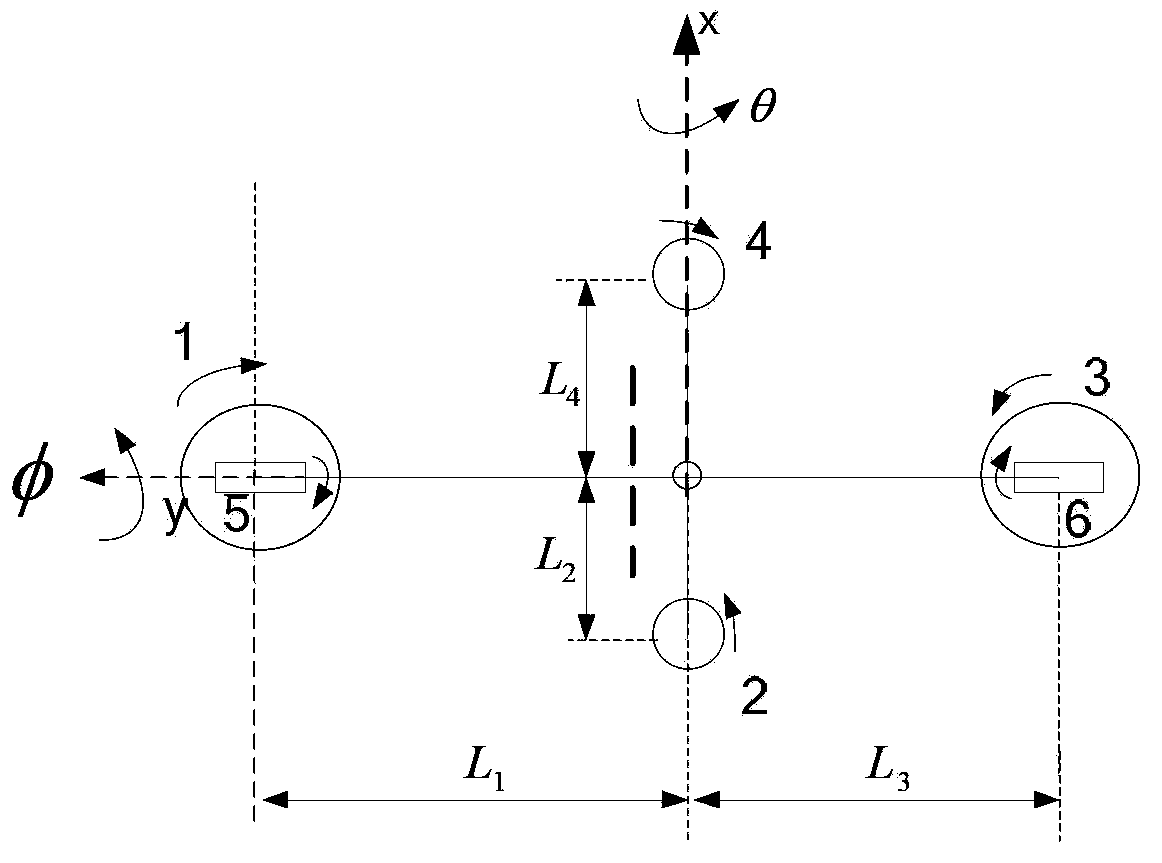
[0065] An embodiment of the present invention is an asymmetric quadrotor UAV such as figure 1 As shown, circles 1-4 represent motor propellers 1-4 respectively, small rectangles 5 and 6 are steering gear deflectors, and large motor propellers 1 and 3 correspond to asymmetric quadrotor drones respectively. In the forward and backward direction of the aircraft, the No. 2 and No. 4 small motor propellers correspond to the left and right directions of the asymmetric quadrotor UAV, and No. 5 and No. 6 are arranged directly below the No. 1 and No. 3 large motor propellers along the axis.
[0066] The main frame material of the asymmetric quadrotor UAV is aluminum alloy pipe, which is connected by welding process to ensure the low weight and high strength of the body; the No. 1 and No. 3 large motor power systems are made by FLYTEC in Germany. One anti-rotation, control the pitch through the differential speed, and provide the main lift of the flight; the propeller of the small motor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com