Wearable six-dimension force sense interaction device with redundant freedom degrees
An interactive device and a technology of degrees of freedom, applied in the direction of manufacturing tools, manipulators, etc., can solve the problems of not considering operator fatigue and increasing operation error rate, and achieve the effect of reducing human fatigue, increasing error rate, and realizing gravity compensation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] The present embodiment is described in detail below in conjunction with accompanying drawing:
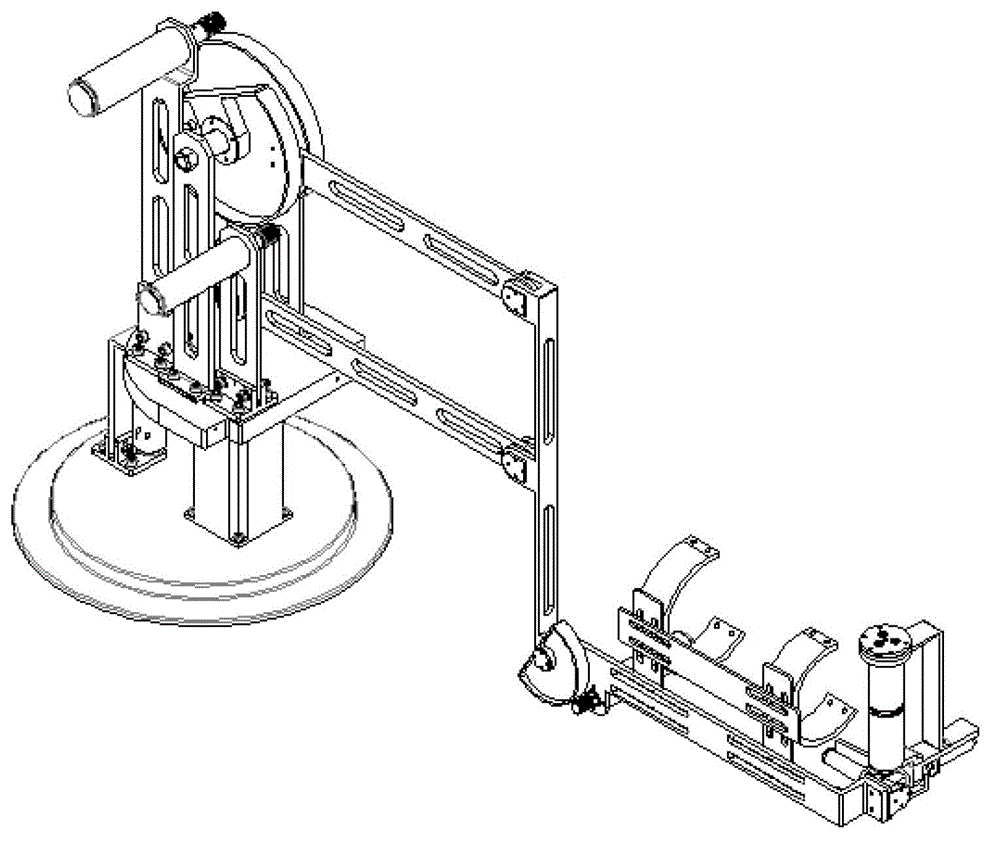
[0049] See eg figure 1 As shown, the present invention is a wearable six-dimensional force-sense interaction device with redundant degrees of freedom. There are six parts: the internal holding mechanism, the six-dimensional force sensor and the driving motor.
[0050] The whole of the present invention can be installed and fixed on any horizontal working platform.
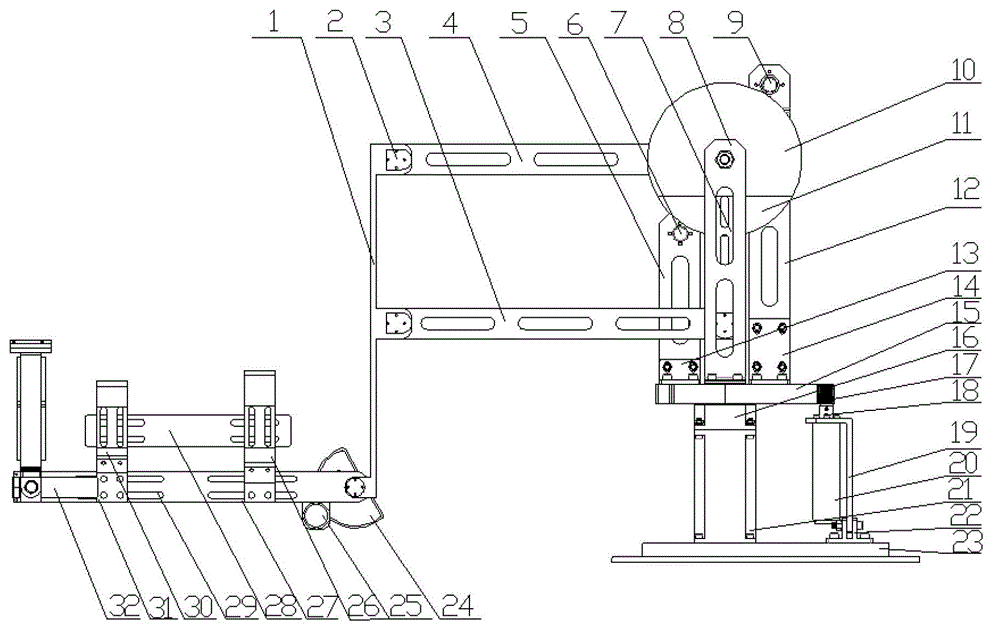
[0051] (1) Z-axis rotary base
[0052] see Figure 2-5, 7, the Z-axis rotary base part is used to complete the rotation of the entire device in the horizontal plane, including the base mounting base plate, base support part, base turntable and base motor part.
[0053] see figure 2 , 5 As shown in , 7, the base support column of the base support part is installed and fixed on the upper surface of the base plate through the front mounting hole of the base mounting base plate. The base support column is fixe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com