State estimation method based on high-order unscented Kalman filtering
An unscented Kalman and state estimation technology, applied in the field of nonlinear filtering and target tracking, can solve the problems of small amount of calculation and limited precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
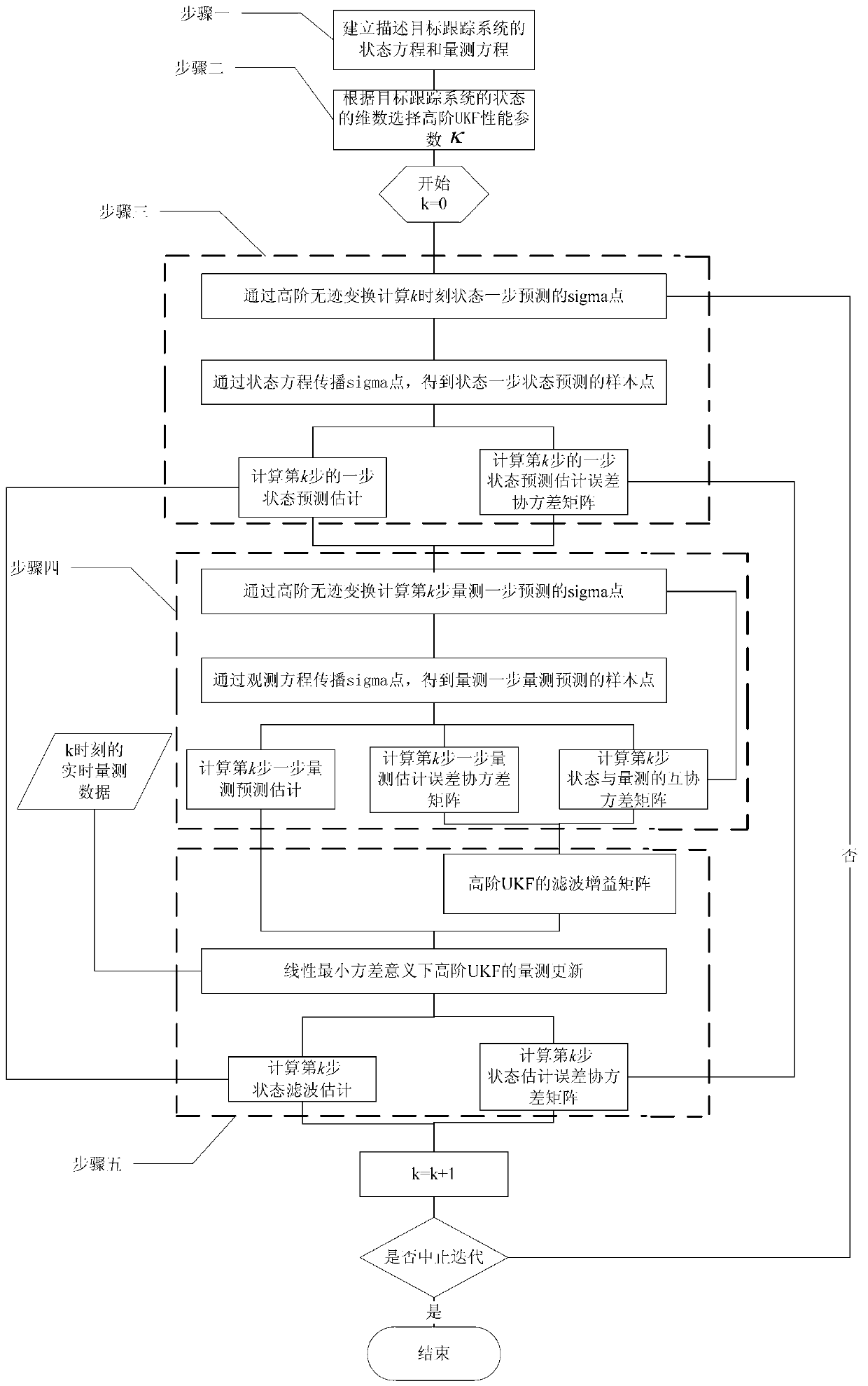
[0078] Specific implementation mode 1. Combination figure 1 This embodiment is specifically described. A state estimation method based on a high-order unscented Kalman filter described in this embodiment includes the following steps:
[0079] Step 1: Establish state equations and measurement equations describing the target tracking system;
[0080] Step 2: Select the high-order UKF performance parameter κ according to the state dimension of the target tracking system;
[0081] Step 3: one-step state prediction, obtain the sigma point for one-step state prediction through high-order unscented transformation (Unscented Transformation, UT), and propagate the sigma point through the state equation to obtain the sample point of one-step state prediction, for one-step The sample points of the state prediction are weighted and calculated to obtain the one-step state prediction estimation and the one-step state prediction estimation error covariance matrix;
[0082] Step 4: One-step...
specific Embodiment approach 2
[0084] Embodiment 2. The difference between this embodiment and the state estimation method based on high-order unscented Kalman filter described in Embodiment 1 is that the establishment of the state equation and measurement describing the target tracking system described in Step 1 The equation is:
[0085] x k = f ( x k - 1 ) + n k - 1 z k = ...
specific Embodiment approach 3
[0087] Specific implementation mode three, combination figure 2 Describe this embodiment in detail. The difference between this embodiment and the state estimation method based on high-order unscented Kalman filter described in Embodiment 1 or Embodiment 2 is that in step 2, according to the dimension of the state of the target tracking system The specific process of numerically selecting the high-order UKF performance parameter κ is as follows:
[0088] When obtaining the optimal value of the performance parameter κ, the sigma point must be able to capture the 4th order moment information of the prior random vector to obtain the quadratic equation of the performance parameter κ:
[0089] (n-1)κ 2 +(2n 2 -14n)κ+n 3 -13n 2 +60n-60=0
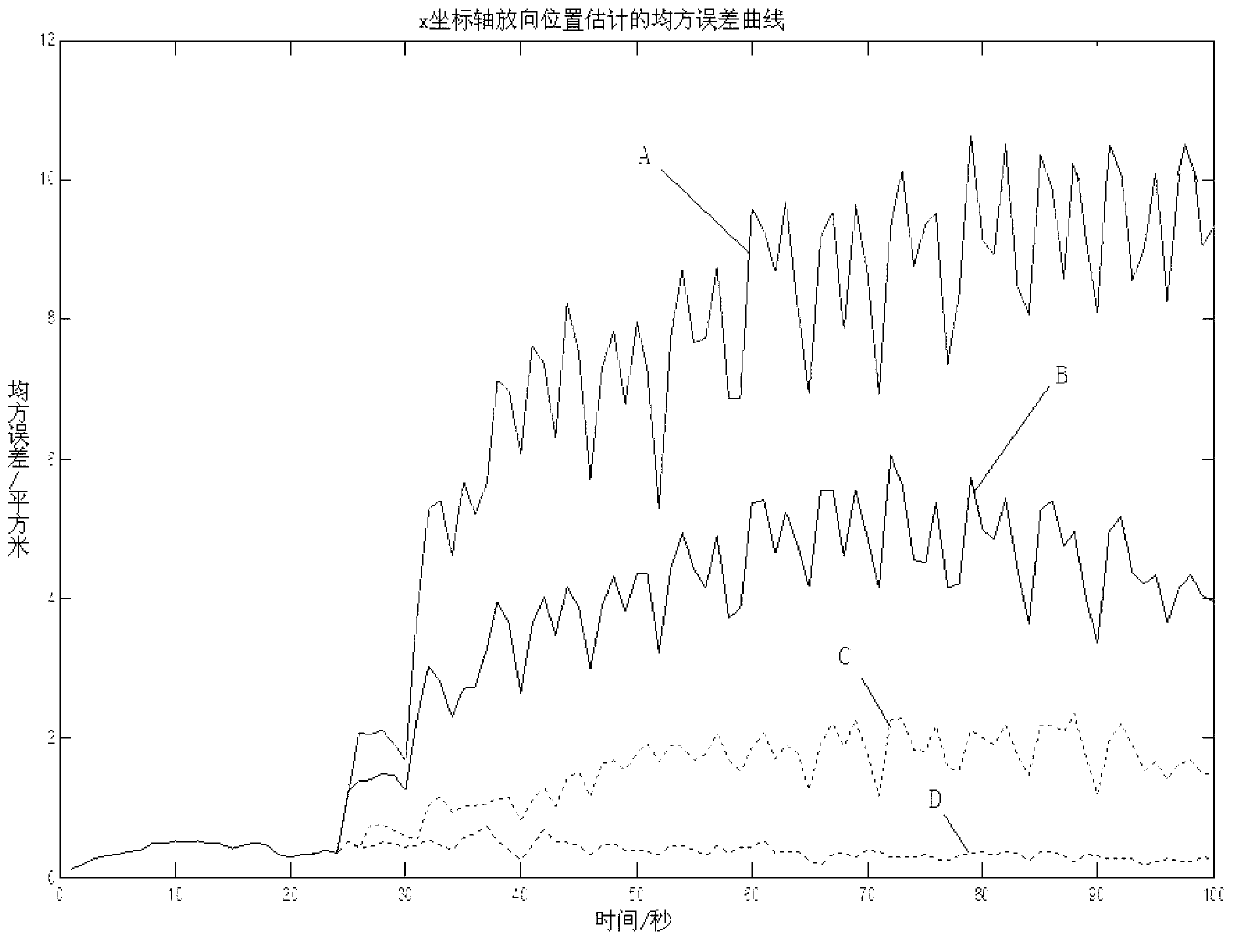
[0090] Solve the performance parameter κ, when the dimension n=2 of the state of the system, the performance parameter κ=0.835; when the dimension n=3 of the state of the system, the performance parameter κ=1.417; now the method provided by ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com