Method for multirobot to search smell sources with cooperation under the dynamic smoke plumage environment
A multi-robot and robot technology, applied to instruments, measuring devices, surveying and navigation, etc., can solve the problems of time-consuming differences, static plume distribution, waste of robot resources, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
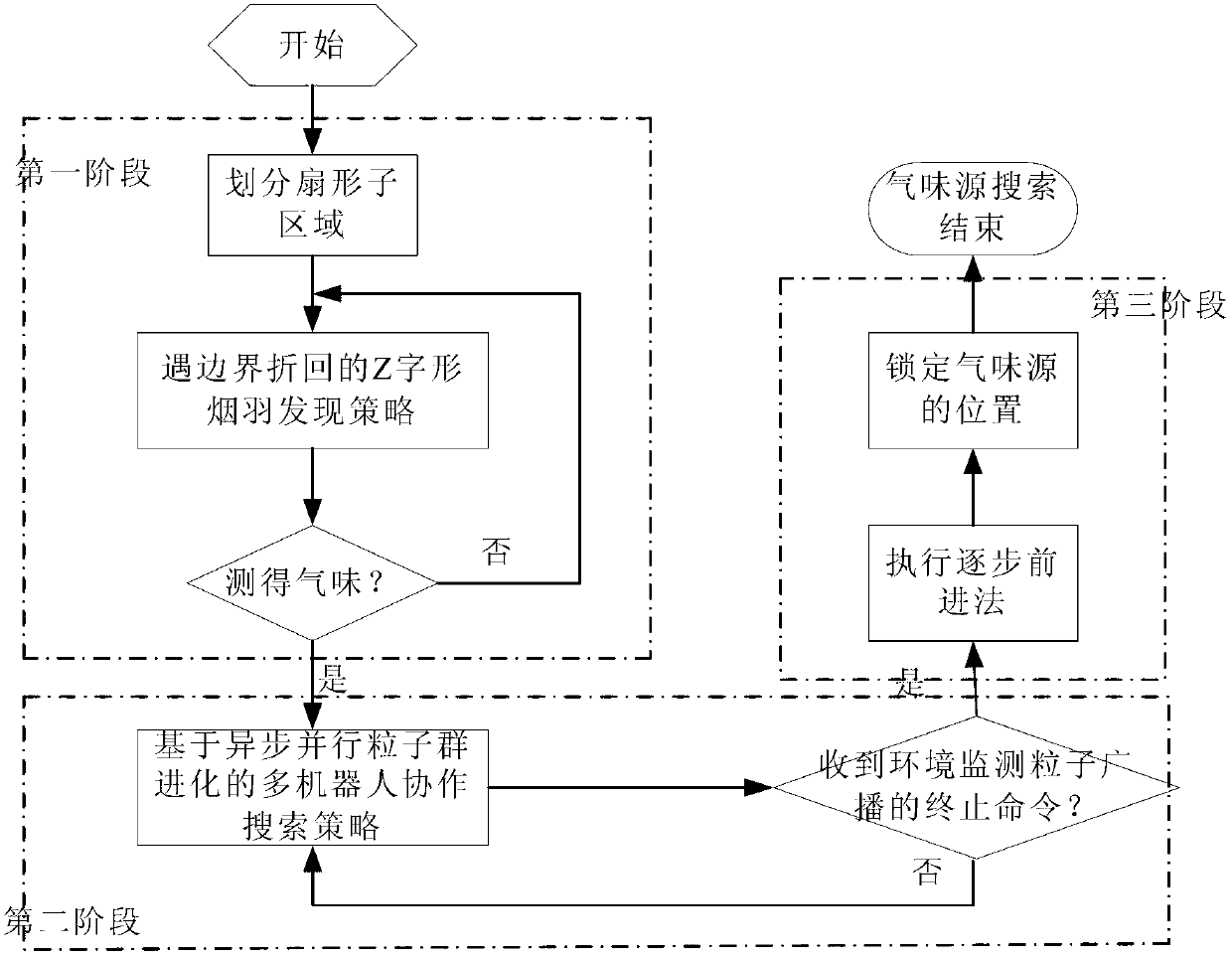
[0098] like image 3 As shown, it is a flow chart of the multi-robot odor source search method in the embodiment of the present invention. The invention divides the odor source search process into three stages: plume discovery, plume tracking and odor source confirmation; the three stages adopt different search strategies, and the three search strategies are organically combined to finally lock the odor source.
[0099] 1) Plume discovery stage
[0100] Divide the entire workspace into multiple fan-shaped sub-areas, and randomly assign a robot in each sub-area. In the absence of any odor information, all robots implement the zigzag plume discovery strategy in their corresponding sub-areas. If a robot detects the plume odor, it enters the plume tracking phase.
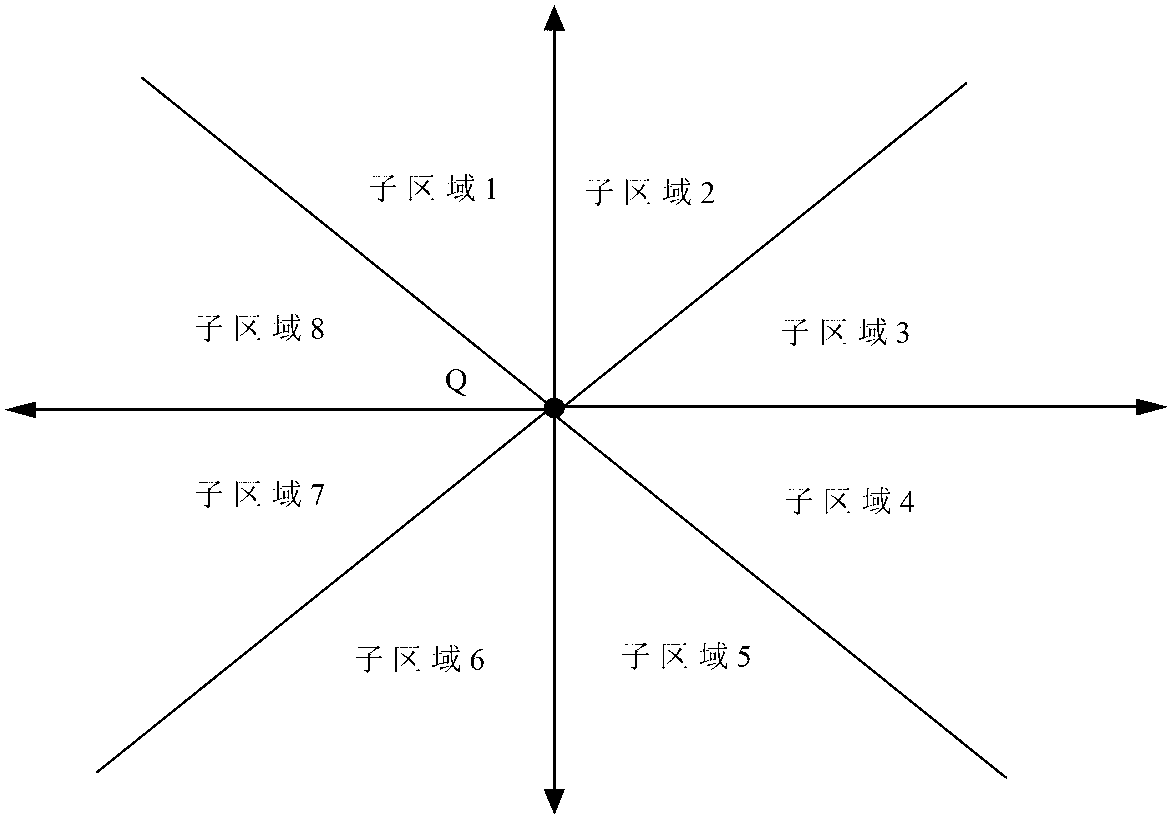
[0101] like Figure 4 As shown, it is a schematic diagram of the method for dividing the fan-shaped sub-regions of the work area in the embodiment of the present invention. Fan-shaped sub-region division method: th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com