Method for establishing relation between scene stereoscopic depth and vision difference in binocular stereoscopic vision system
A technology of binocular stereo vision and establishment method, which is applied in the field of general relationship model, scene depth recovery and 3D reconstruction, scene stereo depth recovery and 3D reconstruction, and can solve lens distortion, camera internal parameters that cannot be achieved, not identical, etc. problem, to achieve the effect of improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention is described in detail below in conjunction with accompanying drawing:
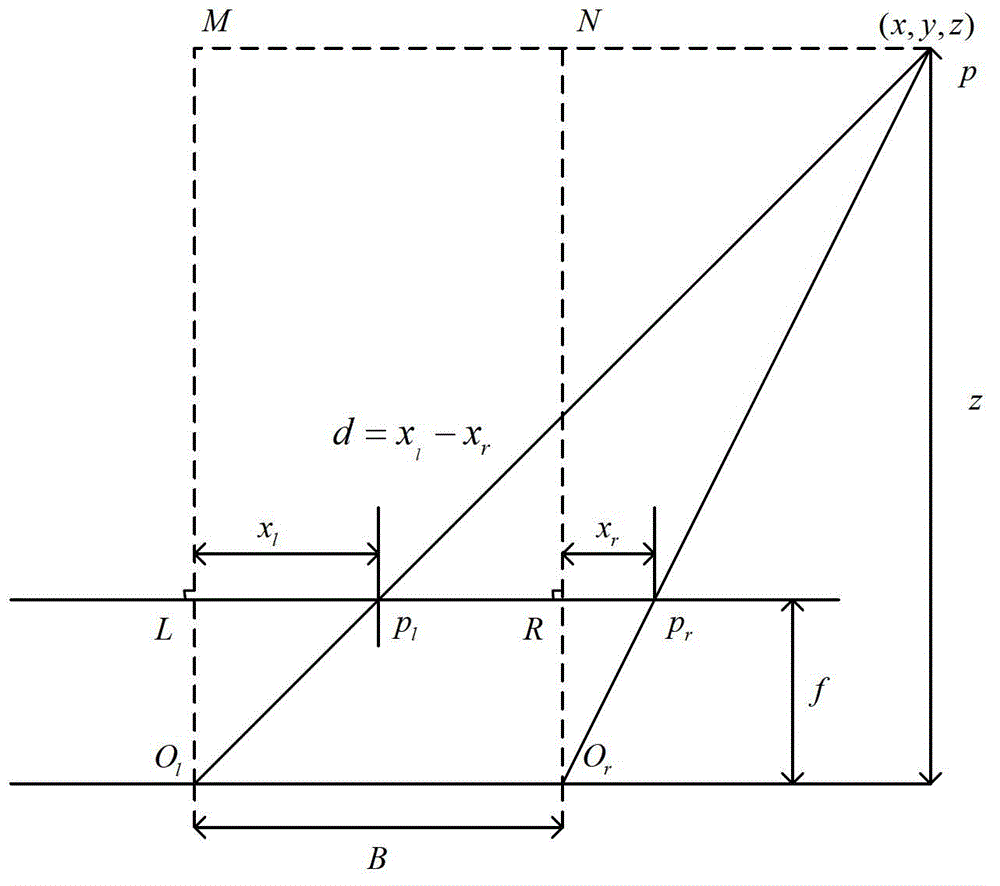
[0036] figure 1 It is the geometric model of a standard parallel binocular stereo vision system. Such as figure 1 As shown, the standard parallel binocular stereo vision system is composed of two identical cameras, the two image planes are located on a plane, the coordinate axes of the two cameras are parallel to each other, and the x-axis coincides. Let O l , O r is the optical center position of the left and right cameras, O l with O r The distance between is the baseline B, the focal length of the camera is f, and the projection point of the scene point p in the left and right image planes is p l and p r . The ideal relationship model between scene stereo depth and parallax of a standard parallel binocular stereo vision system is shown in formula (1):
[0037] z = fB d - - - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com