Visual information-based robot line-walking navigation method along guide line
A technology of visual information and navigation method, which is applied in the field of robot patrolling along the guide line based on visual information, can solve the problems of limited accuracy, accumulation of errors, inability to work, etc., to avoid accumulated errors, expand the scope of application, installation and change handy effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
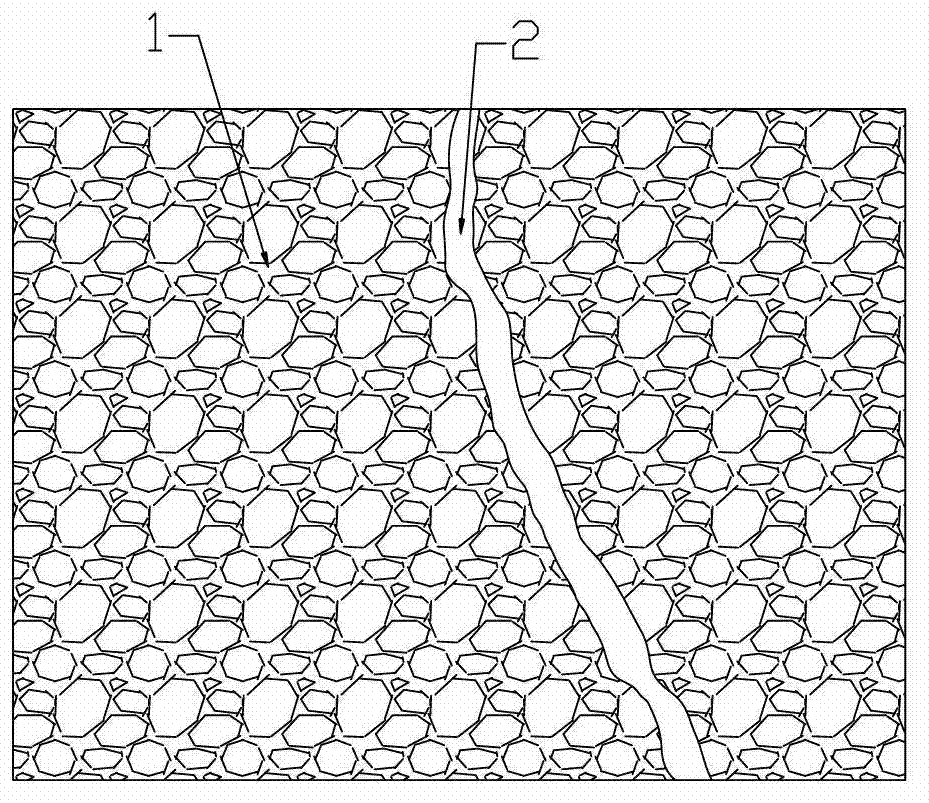
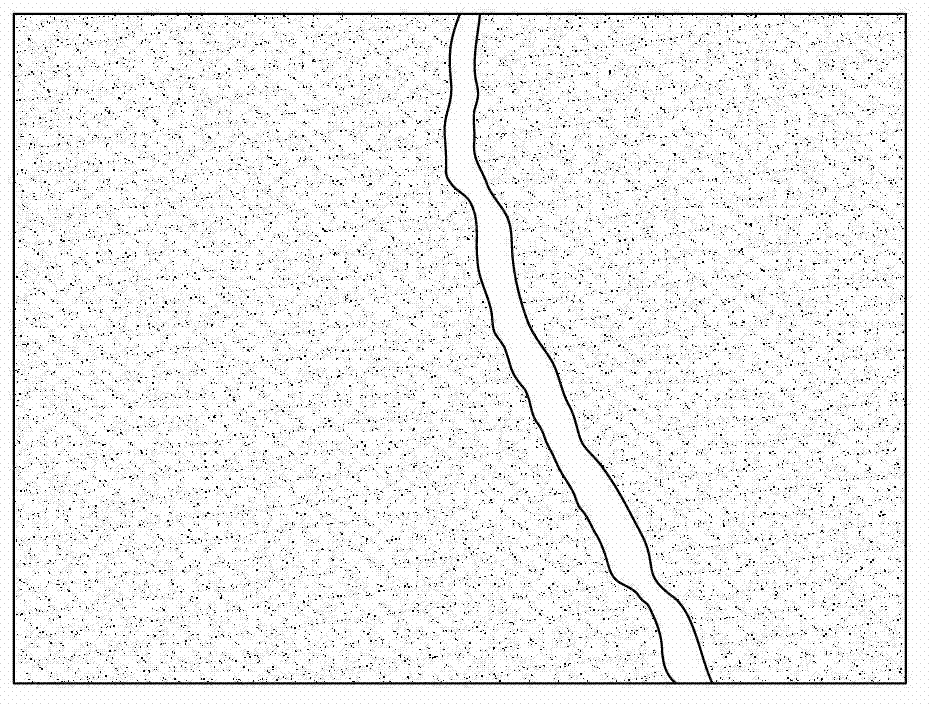
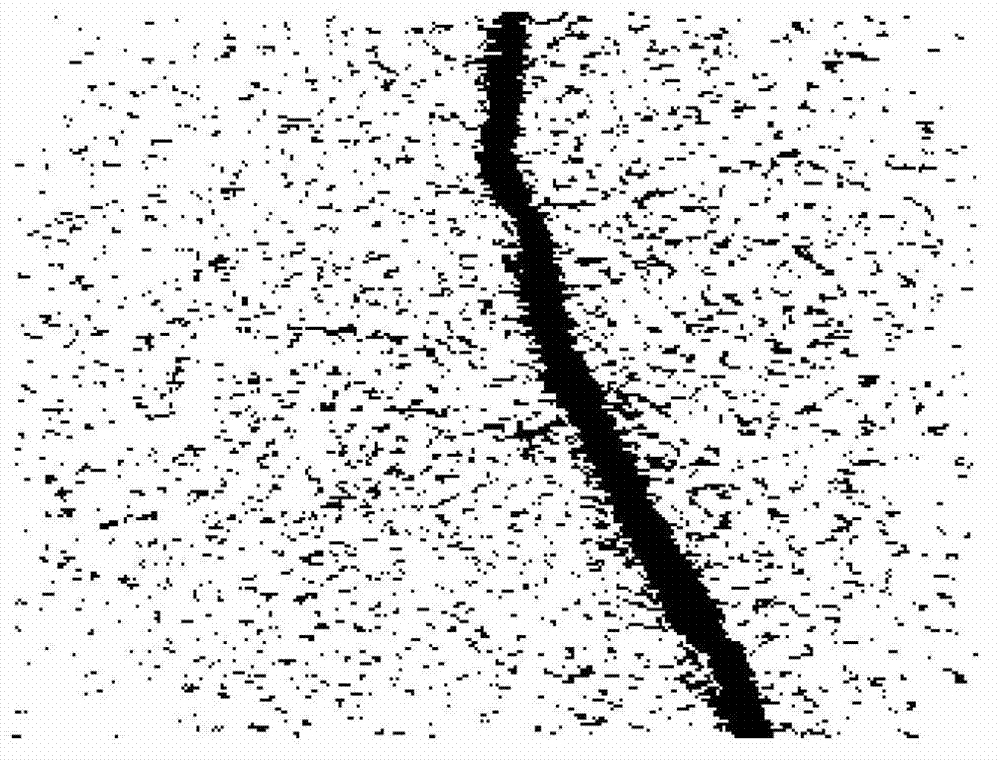
[0035] This embodiment adopts the Pioneer3-AT type mobile robot of MobileRobots Company, the robot of this model is four-wheel drive, and the steering mechanism is similar to that of a crawler vehicle; Equipped with an on-board computer with a main frequency of 1.5GHz. The operating system used by the on-board computer is Windows XP, which is a multi-tasking non-real-time operating system. Users interact with the robot through the AIRA (ActivMedia Robotics Interface for Application) application program interface, such as setting speed, reading status, etc. AIRA is written in object-oriented C++ and supports multi-threading. Users can not only directly drive the robot through low-level commands, but also realize more advanced functions by loading custom tasks. Guiding lines are solid yellow or white solid curves drawn on the road.
[0036] The present embodiment is based on the visual information-based robot patrolling navigation method along the guide line, comprising the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com