Rolling double four-parallelogram robot
A parallelogram and robot technology, applied in the field of robots, can solve the problems of unchanged shape, poor adaptability to the ground environment and surrounding space environment, etc., and achieve the effects of low cost, simple structure, easy manufacturing and engineering realization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
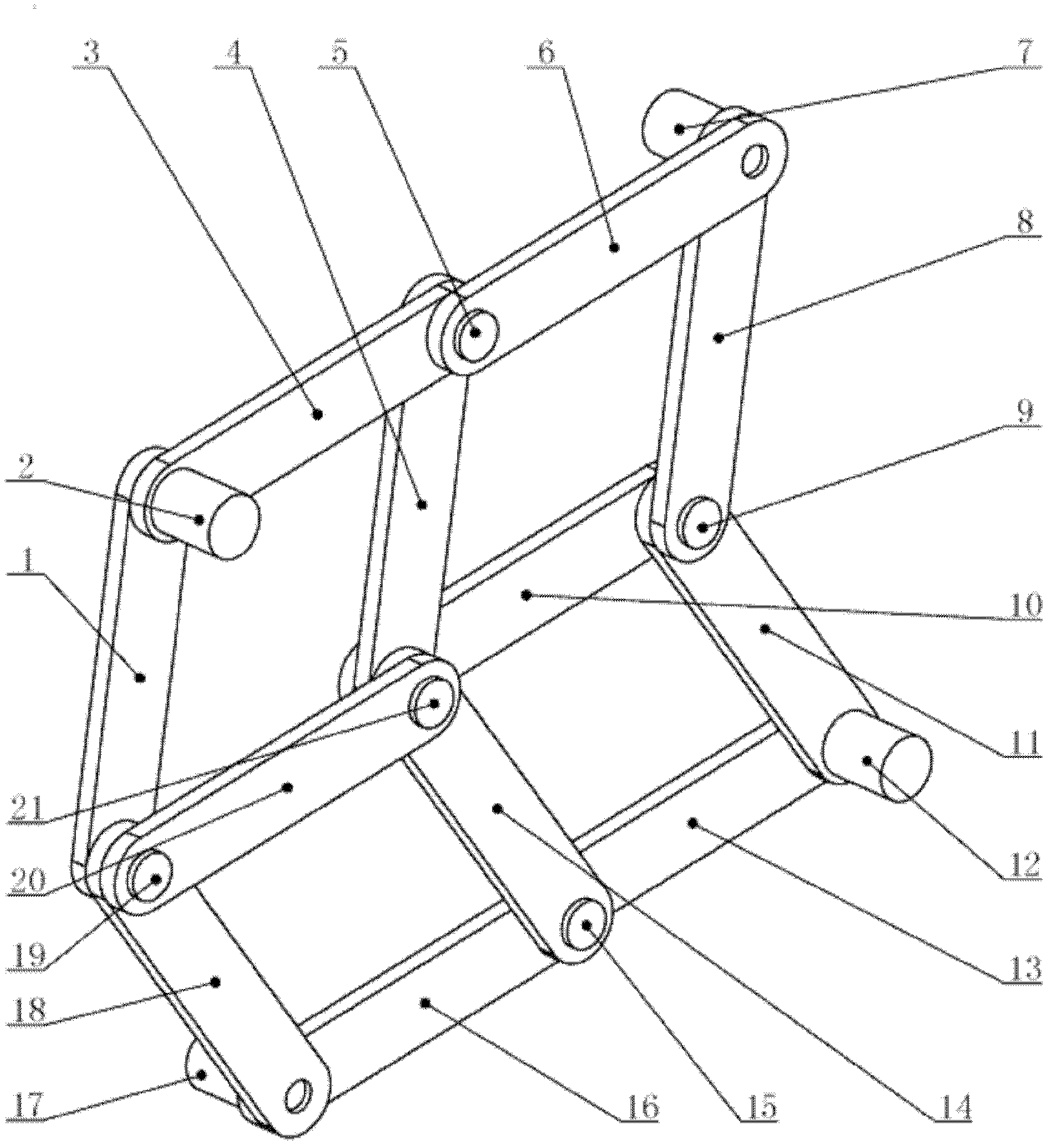
[0036] like figure 2 , the first quadrilateral is composed of the motor synchronous link (1), the motor seat link (3), the public link (4) and the public link (20), the motor synchronous link (1) and the motor seat link ( 3) Constitute a revolving pair as a vertex of a parallelogram, the motor seat connecting rod (3) and the common connecting rod (4) constitute a revolving pair as a vertex of a parallelogram, and the common connecting rod (4) and the common connecting rod (20) constitute a revolving pair As a vertex of a parallelogram, the motor synchronous connecting rod (1) and the public connecting rod (20) constitute a revolving pair as a vertex of a parallelogram; the second quadrilateral consists of a motor synchronous connecting rod (6), a motor base connecting rod (8), Public connecting rod (10) and public connecting rod (4) constitute, and motor synchronous connecting rod (6) and motor seat connecting rod (8) constitute rotating pair as a vertex of parallelogram, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com