Master-slave hydraulic mechanical arm controller
A technology of hydraulic machinery and controllers, applied in the field of master-slave hydraulic mechanical arm controllers, which can solve problems such as low precision, difficult control procedures, and poor operational flexibility, and achieve high-voltage insulation, flexible and convenient operation, and stable and reliable performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
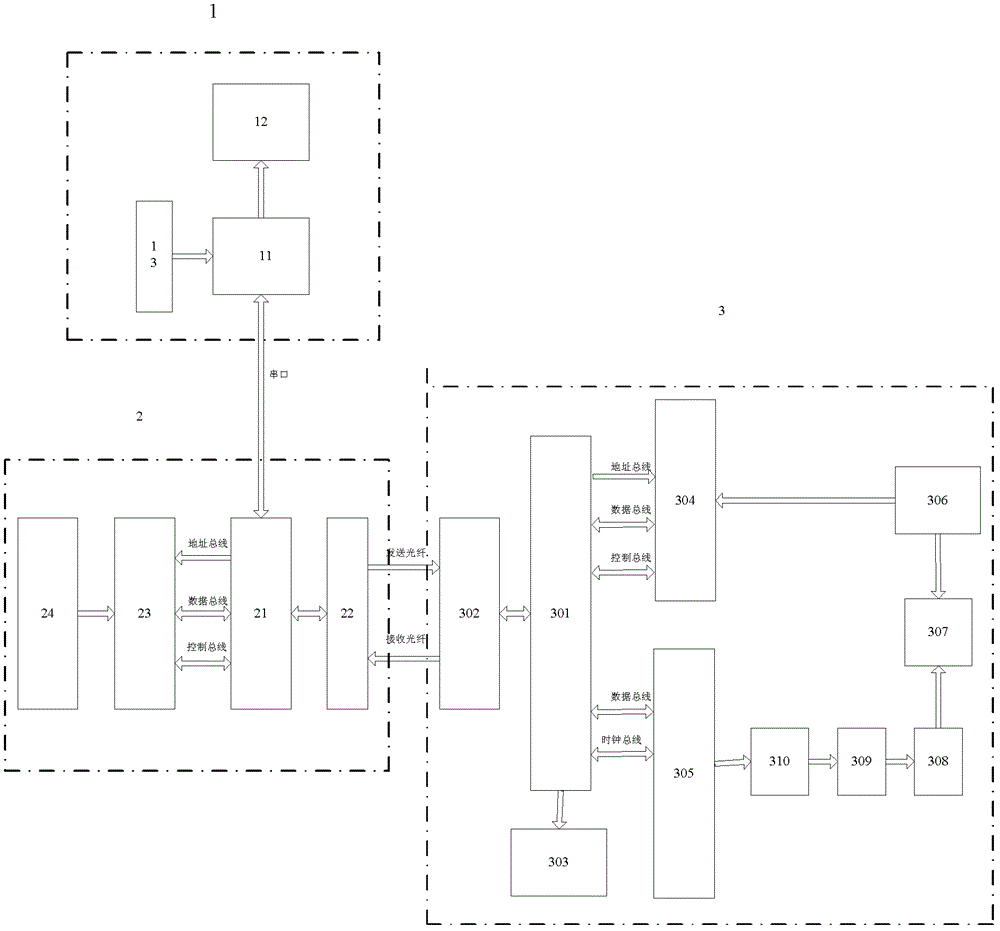
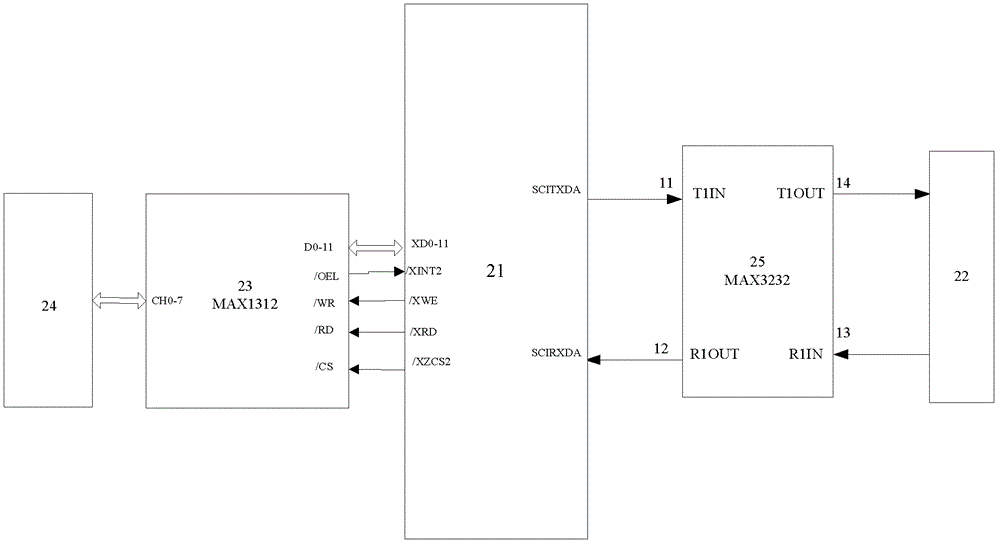
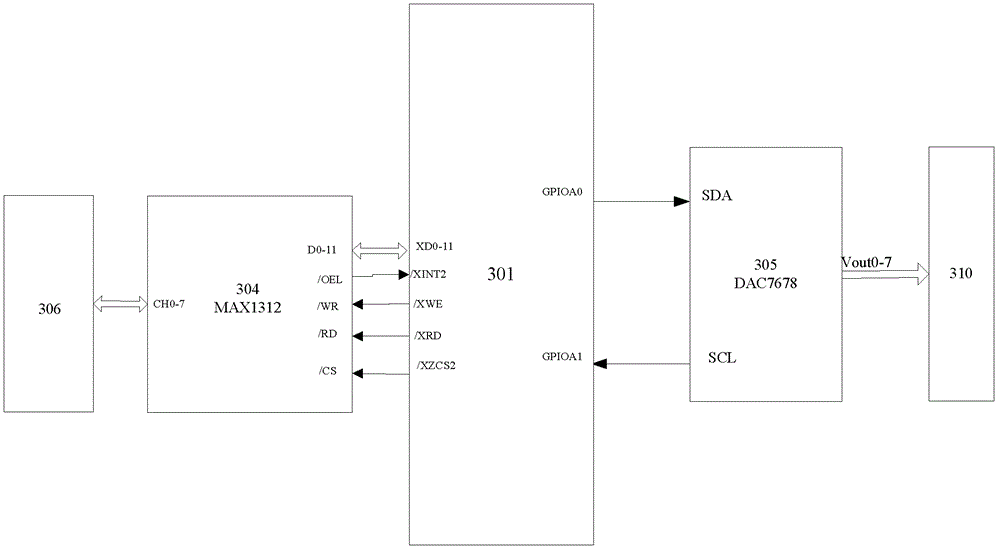
[0033] see figure 1 , a master-slave hydraulic manipulator controller, including a connected hand-held terminal 1, an embedded master hand controller 2 and a manipulator controller 3, the hand-held terminal 1 includes a microprocessor I11, and the microprocessor I11 is respectively Link to each other with the microprocessor II21 of man-machine interface unit and master controller 2; Described master controller 2 comprises microprocessor II21, and microprocessor II21 is connected with A / D converter I23, serial port to optical fiber module 22 respectively; A / D converter I21 is connected with the potentiometer 24 of main hand; Microprocessor III301 of mechanical arm controller 3 is connected with A / D converter II304, D / A converter 305, electromagnetic valve 303 respectively; A / D converter II304 is connected with the potentiometer 306 of the mechanical ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com