Multi-sensor service-based robot following system and method
A multi-sensor, robot technology, applied in the field of robotics, can solve the problem of not considering obstacle avoidance, unable to track multiple targets, etc., to achieve the effect of improving robustness and tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0022] Below in conjunction with accompanying drawing and specific embodiment the technical scheme of invention is described in further detail:
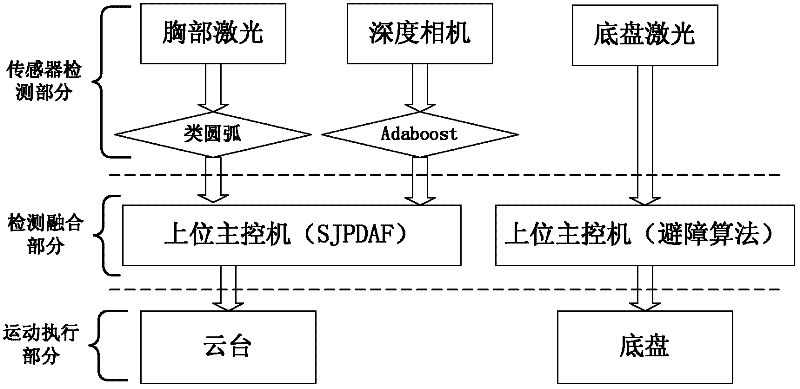
[0023] figure 1 It is a structural schematic diagram of the robot following system provided by the present invention. Such as figure 1 As shown, the robot following system of the present invention includes a sensor detection part, a detection fusion part and a motion execution part. The laser and depth camera are used to collect the target person, and the host computer uses the sampling-based joint probability filter algorithm (SJPDAF) to update the target person's position, and the gimbal and chassis track and follow according to the updated target person's position.
[0024] The sensor detection part is responsible for collecting the position and chassis obstacle information of all similar people in the field of vision, and sending all the measurement information to the upper host computer. The sensor detection part includes a v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com