Human type robot kicking action information processing method based on rapid search tree
An information processing method and robot technology, applied in the field of information processing of humanoid robot kicking movements, can solve problems such as interference, inability to complete kicking movements, tedious and boring human labor, etc., and achieve the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0034] Such as figure 1 , figure 2 As shown, a method for processing information of a humanoid robot's kicking action based on a fast search tree includes the following steps:
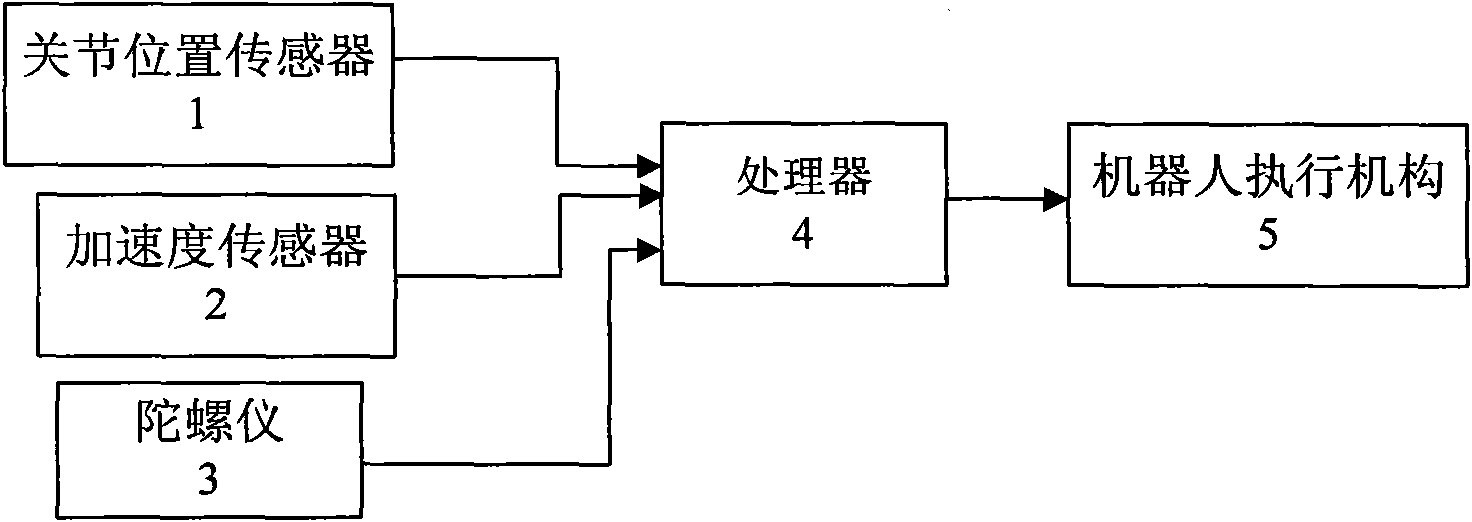
[0035] 1) The robot obtains the current state of the robot through the forward motion model according to the information collected by the joint position sensor 1, the acceleration sensor 2 and the gyroscope 3 in an uncertain environment;
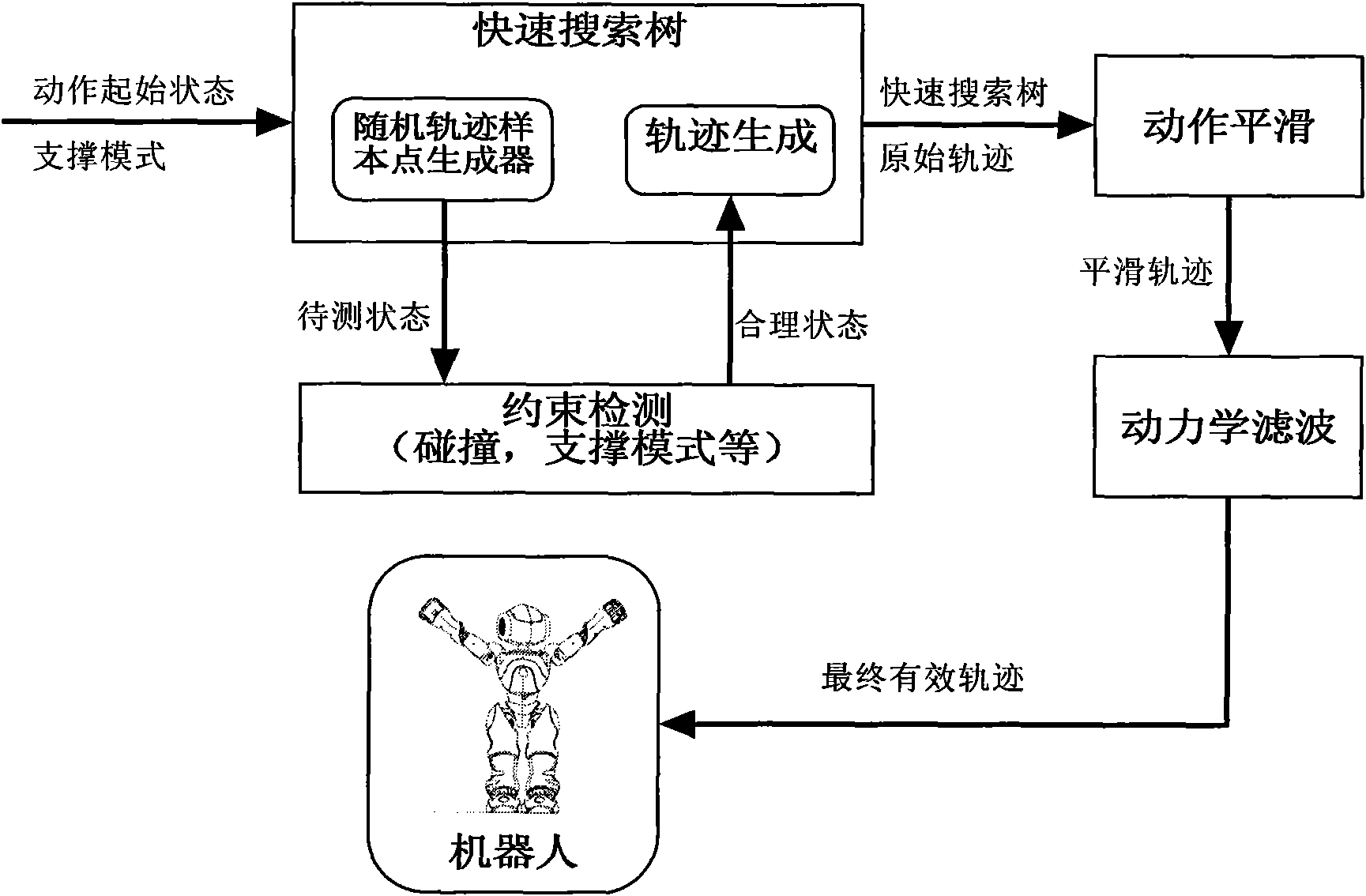
[0036] 2) The processor 4 of the robot calculates the motion trajectory of each joint of the robot required by the fast random search tree according to the current state and the termination state of kicking the ball;
[0037] 3) The motion smoothing filter is used to smooth the joint motion trajectory generated in step 2), and the dynamic filter is corrected to obtain a stable final kicking motion trajectory, and the trajectory is sent to the robot actuator.
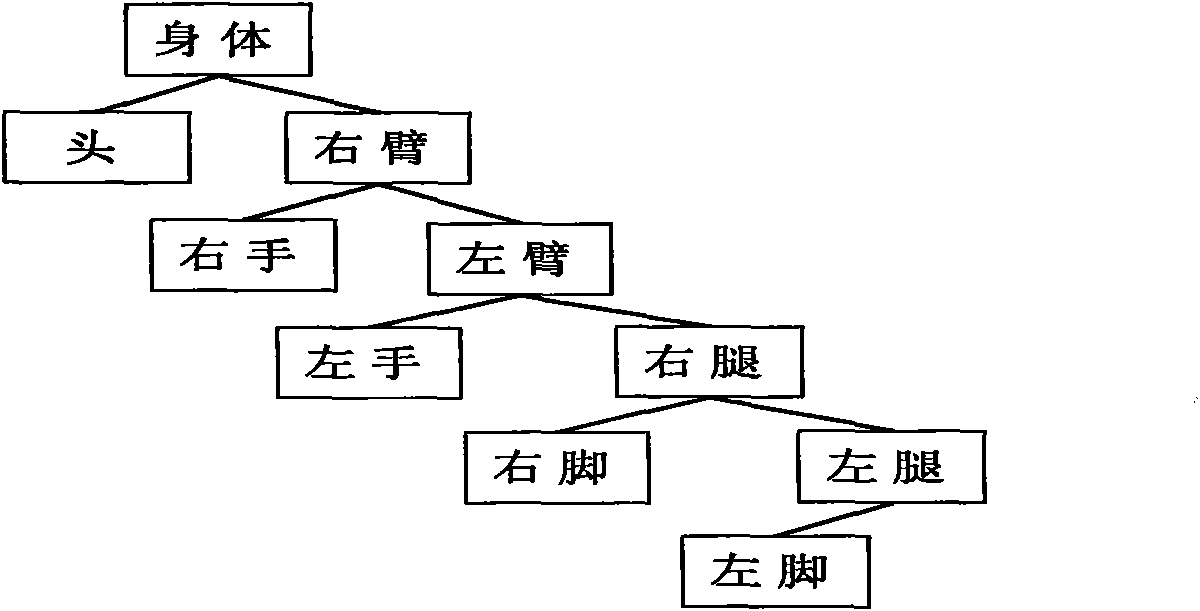
[0038] The calculation of robot pose is one of the foundations of action planning, which mainly includes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com