


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method for estimating state during running process of automobile
A driving process and state estimation technology, which is applied in the field of state estimation, can solve the problems of increasing the driving danger of automobiles, unable to meet the requirements of realizing active safety of automobiles, and failing to guarantee fault tolerance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0115] Taking the domestic Changfeng Leopard CFA6470MA off-road vehicle as an example, its parameters are shown in Table 1.
[0116] Table 1 Main parameters of CFA6470MA off-road vehicle (unit: mm)
[0117]
[0118]
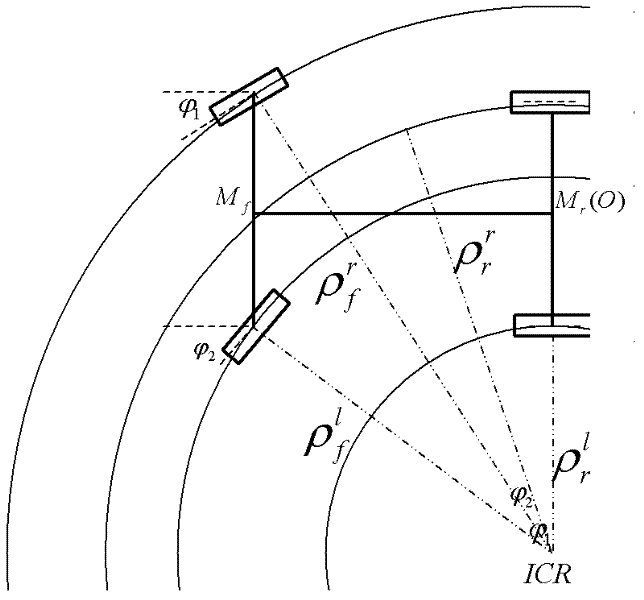
[0119] According to the vehicle parameters in Table 1 and formulas (1) and (2), the steering angle can be obtained is 24.786°, similarly we can get is 33.093° (maximum steering angle), and then the virtual steering angle can be obtained is 28.393°. further can be calculated is 5901.2mm, is 4071.2mm, It is 4899.0mm. The theoretically calculated radii such as Figure 5 shown.
[0120] Table 2 Comparison of track radius measured value and theoretical value
[0121]
[0122] When the car turns on the spot, measure the track of the outermost car. The data are shown in Table 2. The minimum turning radius is 6195.7mm, and the maximum steering angle of the car is back calculated to be 35.2607°: while the theoretical turning radius is 6500mm, the i...
Embodiment 2
[0130] An important parameter in the car kinematics model proposed in the present invention is the virtual steering angle of the front wheel Its value can be determined by the steering wheel steering tester. First, the angle of rotation of the steering wheel is measured as φ, then the steering angle between it and the front wheel of the car is The relationship between Where k is the reduction ratio of the steering system of the car. The k value can be obtained from the vehicle technical indicators. In some vehicle indicators, there is no deceleration ratio parameter, and it can also be determined through experiments. The measurement method is: the maximum steering wheel angle φ after the steering wheel of the vehicle is killed max , and then the steering angle can be obtained according to the minimum turning radius in Table 1 and formula (2) is 0.5192 (29.751°), from the formula (1) can be obtained is 0.7449 (42.680°). at this time is the maximum steering angle, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com