Safe force-coupling-free six-dimensional force sensor
A six-dimensional force sensor, safe technology, applied in the field of sensors, can solve the problems of reducing the dynamic response characteristics of sensors, low sensor safety, etc., achieve effective overload protection, avoid complex decoupling algorithms, and eliminate coupling effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
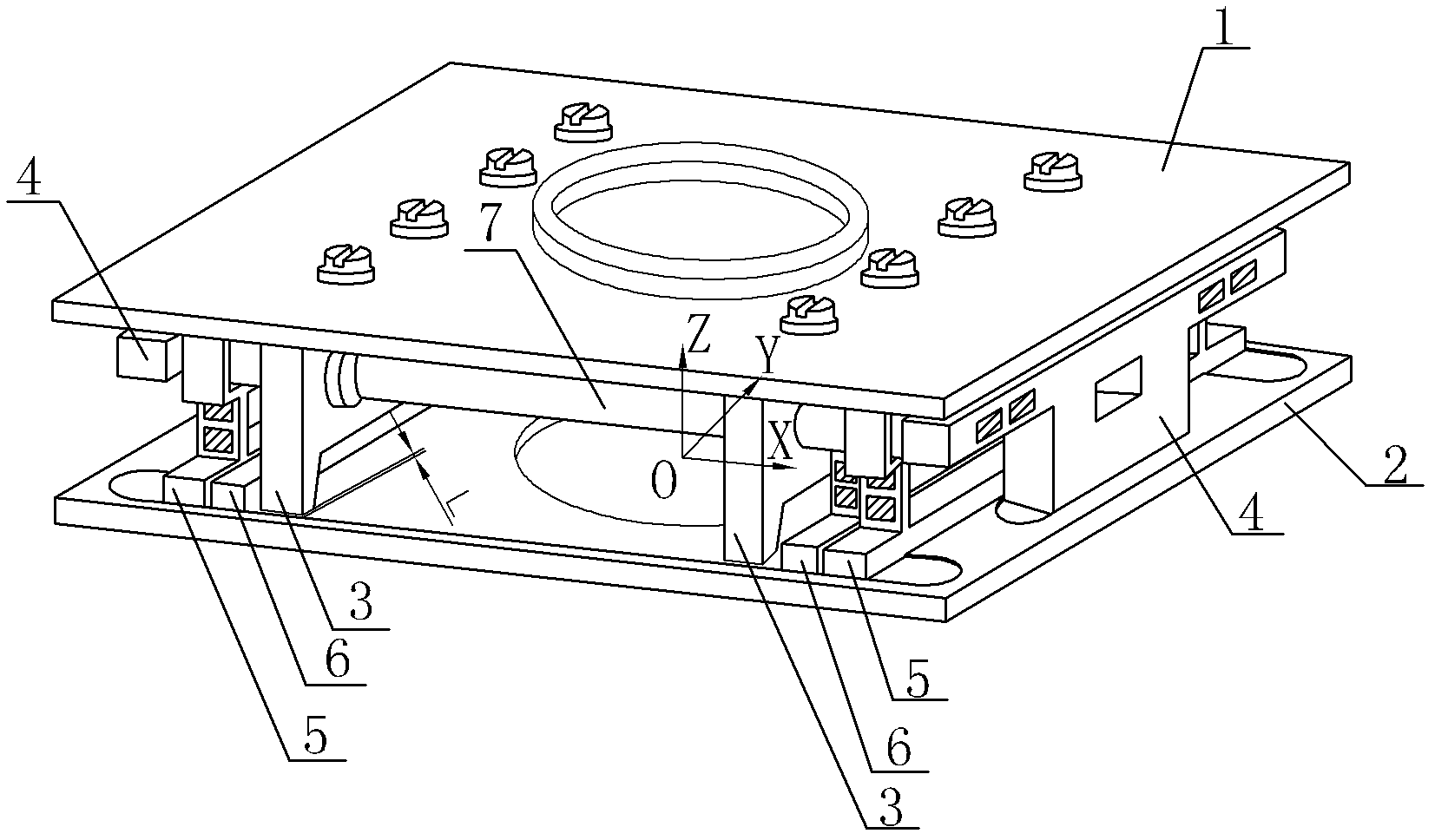
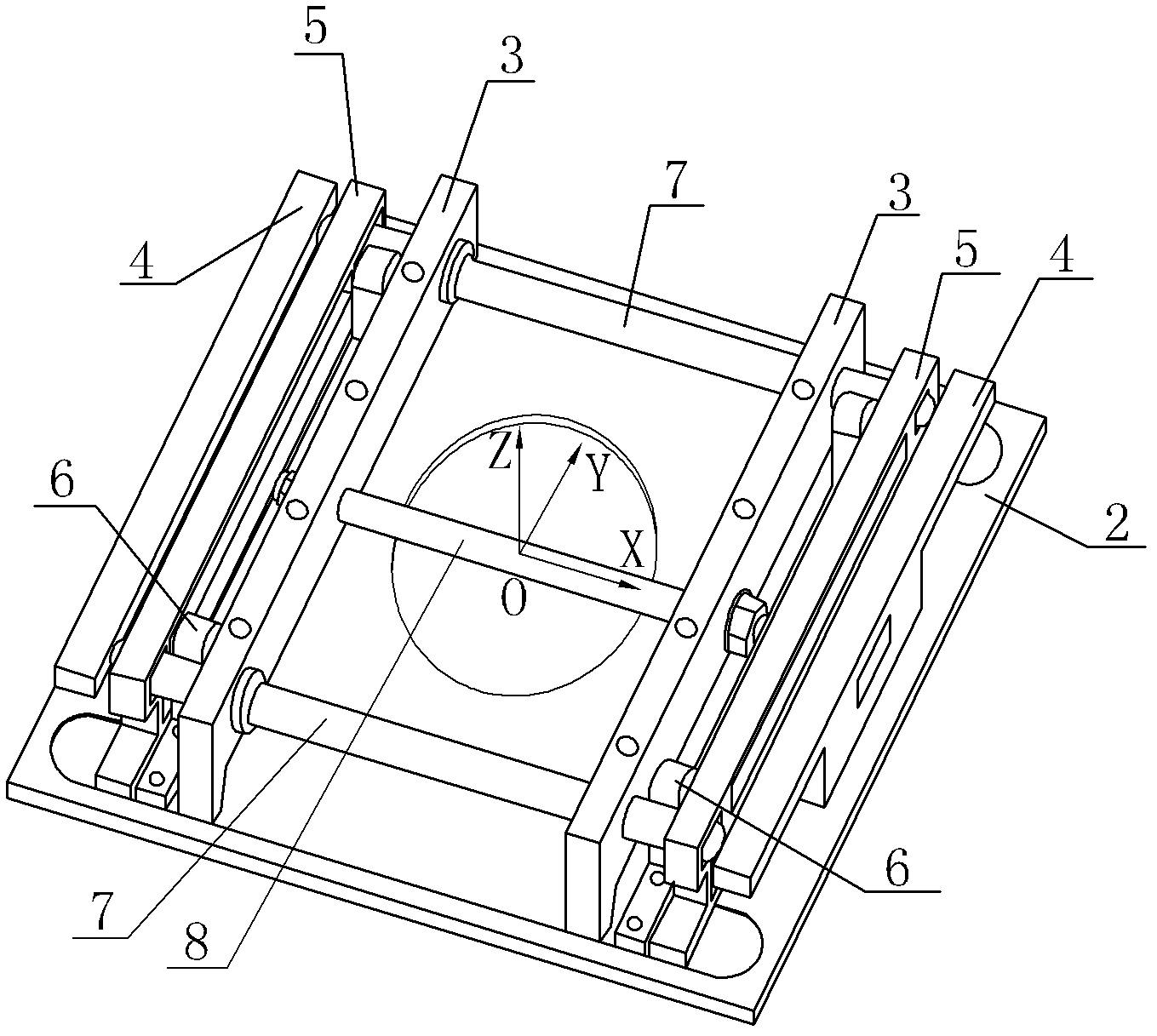
[0009] Specific implementation mode one: as Figure 1-2 As shown, a safe forceless coupling six-dimensional force sensor described in this embodiment includes an upper plate 1, a lower plate 2 and two support blocks 3, the two support blocks 3 are arranged side by side in parallel, and the upper plate 1 and the lower plate 2 are parallel Set, two support blocks 3 are located between the upper plate 1 and the lower plate 2, and the upper surface of each support block 3 is connected to the lower surface of the upper plate 1, and two measurement F x The elastic body 4, two measurements F z The elastomer 5, two measurements F y The elastic body 6 and two force guide rods 7, the outer sides of the two support blocks 3 and the space between the upper plate 1 and the lower plate 2 are respectively provided with a measuring F x The elastomer 4, a measurement of F z The elastomer 5, a measure F y of elastomer 6, and measure F x 4. Measure F z 5. Measure F y The elastic body 6 is...
specific Embodiment approach 2
[0011]Specific implementation mode two: as image 3 As shown, each measurement F of a safe forceless coupling six-dimensional force sensor described in this embodiment x The elastic body 4 consists of a long rod 4-1 and a rectangular plate 4-2, one long side of the rectangular plate 4-2 is fixedly connected to the side of the long rod 4-1, and the rectangular plate 4-2 There are rectangular through holes on the side. Other compositions and connections are the same as those in Embodiment 1
specific Embodiment approach 3
[0012] Specific implementation mode three: as Figure 4 As shown, each measurement F of a safe forceless coupling six-dimensional force sensor described in this embodiment z The elastic body 5 is composed of a base plate 5-1, two vertical plates 5-2 and a rectangular long plate 5-3, the rectangular long plate 5-3 and the base plate 5-1 are arranged side by side in parallel, and the two vertical plates 5-2 are parallel to each other It is arranged between the rectangular long plate 5-3 and the bottom plate 5-1, and the two ends of each vertical plate 5-2 are fixedly integrated with the rectangular long plate 5-3 and the bottom plate 5-2 respectively, and the rectangular long plate A rectangular through hole is opened in the middle of the side of the 5-3, and a rectangular through hole is opened in the sides of the two ends of the rectangular long plate 5-3. Other compositions and connections are the same as those in Embodiment 2
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com