Passive robot joint with adjustable rigidity elasticity
A technology of robot joints and stiffness, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of energy loss and time-consuming, and achieve the effect of improving energy efficiency of motion and realizing dynamic high-speed motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
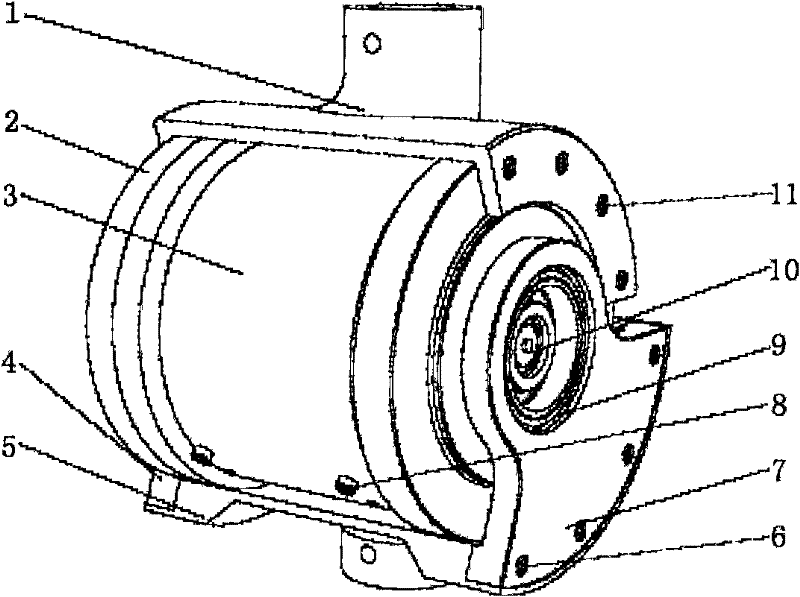
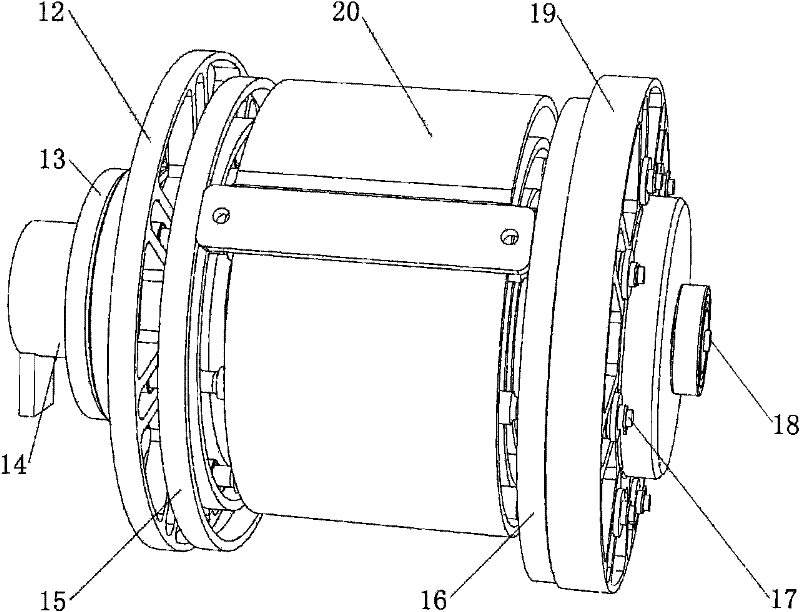
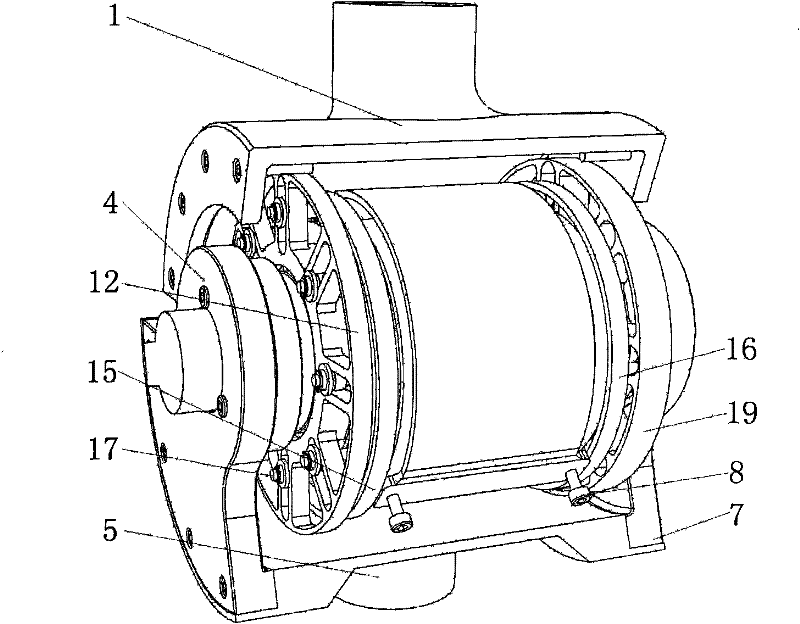
[0023] The passive robot joint with adjustable stiffness and elasticity of the present invention, its preferred specific implementation is as follows figure 1 , Figure 2a , Figure 2b As shown, the passive robot joints are respectively connected with the calf support base 5 and the thigh support base 1, the passive robot joints include a spring drum 3, and the joint stiffness elastic adjustment device is installed inside the spring drum 3, and the spring drum 3 3 is connected with the thigh support seat 1, and the protruding end of the joint stiffness elastic adjustment device is connected with the calf support plate 7, and the joint stiffness elastic adjustment device includes a planar non-contact scroll spring 20, the planar The inner end of the non-contact scroll spring 20 is connected to the spring reel 16, and the outer end is connected to the spring reel 3. The middle of the planar non-contact scroll spring pitch is supported by a support rod 17, and the support rod is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com