Robot playing the dulcimer and control method
A technology of robot and robot body, applied in the field of robots, to achieve the effect of realistic performance, rapid movement and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with accompanying drawing.
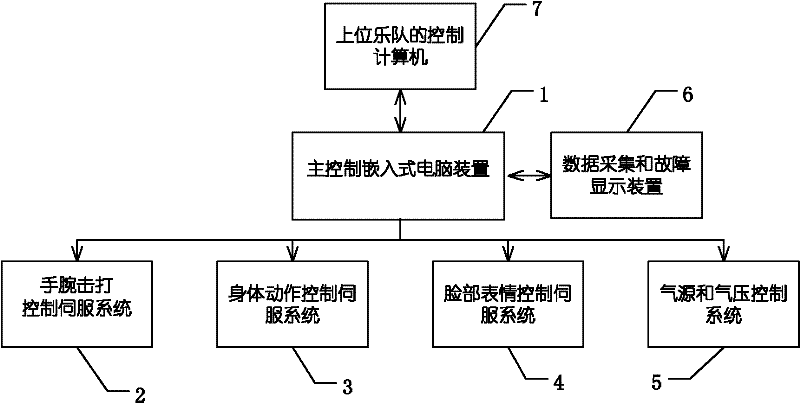
[0051] see figure 1 , the figure shows a kind of robot that plays dulcimer of the present invention, and this robot is connected with the control computer 7 of upper band to receive the control of band, and it comprises a robot body (not shown in the figure), and this robot body Including wrist (not shown in the figure), body running joints (not shown in the figure), face (not shown in the figure), dulcimer (not shown in the figure), the present invention includes a main control embedded Computer device 1 and wrist strike control servo system 2, body motion control servo system 3, facial expression control servo system 4, air source and air pressure control system 5, data acquisition and Fault display device 6, wherein:
[0052] The main control embedded computer device 1 realizes the data processing and order sending of the dulcimer playing robot, it communicates with th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com