Three-dimensional coordinate measuring system of handheld target trinocular camera
A measurement system and three-dimensional coordinate technology, applied in the direction of measuring devices, instruments, optical devices, etc., can solve the problems of reduced measurement accuracy, small effective field of view, and measurement failure, so as to improve the solution accuracy and avoid the reduction of edge measurement accuracy , the effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
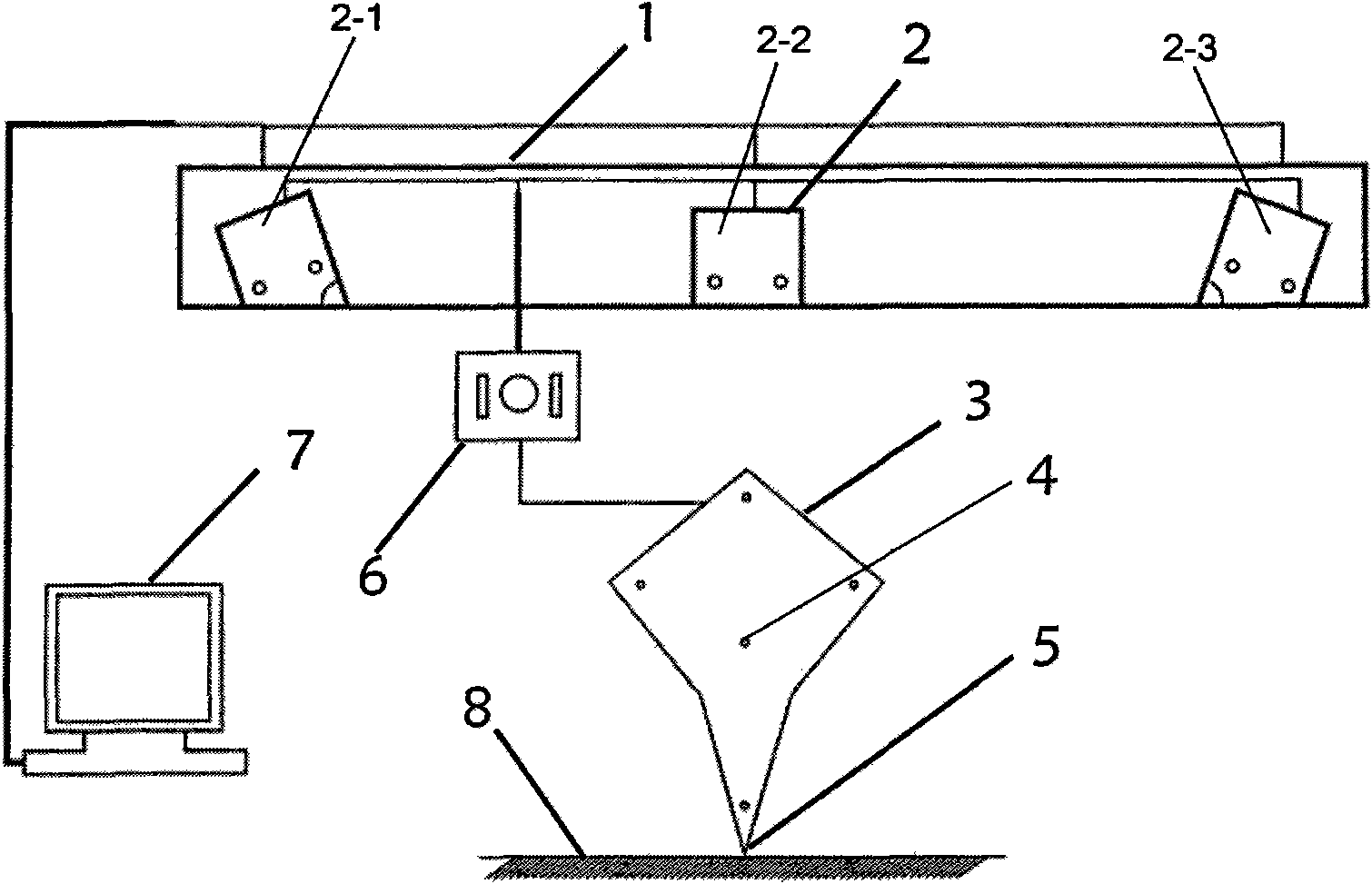
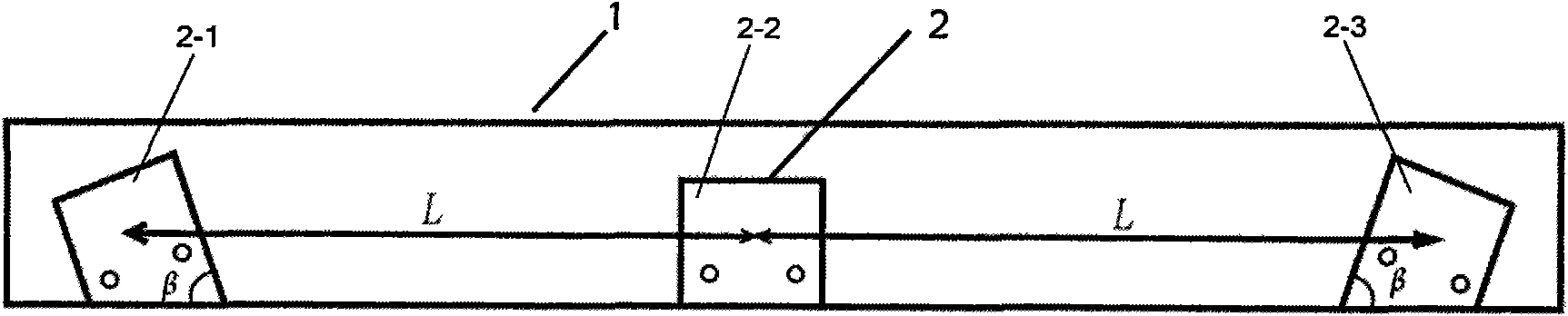
[0014] refer to figure 1 , 2 , 3, among the three cameras, the first camera 2-1, the second camera 2-2, and the third camera 2-3 are respectively placed in the camera card slot 2 of the camera array base 1, and the first camera 2 -1 and the third camera 2-3 are basically on the same plane, and the optical axis of the second camera 2-2 in the middle is at the angle between the optical axis of the first camera 2-1 and the third camera 2-3 On the bisected plane and perpendicular to the base 1 of the camera array, the angle β between the first camera 2-1, the third camera 2-3 and the base 1 of the camera array is 70 degrees, and the optical center of the first camera 2-1 reaches The second camera 2-2 optical center, the distance from the second camera 2-2 optical center to the third camera 2-3 optical center is L is 0.5 meters, and the hand-held target 3 is composed of 5 luminous marker points 4, Form a cross shape, the middle three luminous mark points 4 are on a straight line ...
Embodiment 2
[0016] The hand-held target 3 is composed of 9 luminous marking points 4, and its shape is rhombus. There are three luminous marking points 4 on each side of the rhombus, and there is one luminous marking point 4 in the middle. The distance is 25mm, the distances between the two diagonals are 60mm and 80mm respectively, and the distance between the light-emitting marker point at one end of the rhombus diagonal and the measurement contact point 5 is 20mm, and the rest are the same as in Example 1.
Embodiment 3
[0018] The hand-held target 3 is composed of 7 luminous marker points 4, which are in the shape of a cross, of which 5 luminous marker points 4 are on the same straight line with a distance of 30 mm. The distance between the measurement contact point 5 and the luminous marker point 4 at one end of the straight line is 20mm, and the other two luminous marker points 4 are on the same straight line as the second luminous marker point at the other end of the line, with a distance of 30mm, and the rest are the same as in embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com