Unified dynamic modeling method of generalized system of crawler-type mobile manipulator
A mobile manipulator, dynamic modeling technology, applied in the direction of manipulator, general control system, control/regulation system, etc., can solve the problem of ignoring the influence of the control system, the assumption of complete speed tracking is not established, and the lack of effective measures for the non-holonomic constraints of the mobile platform, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0075] The specific parameters are as follows:
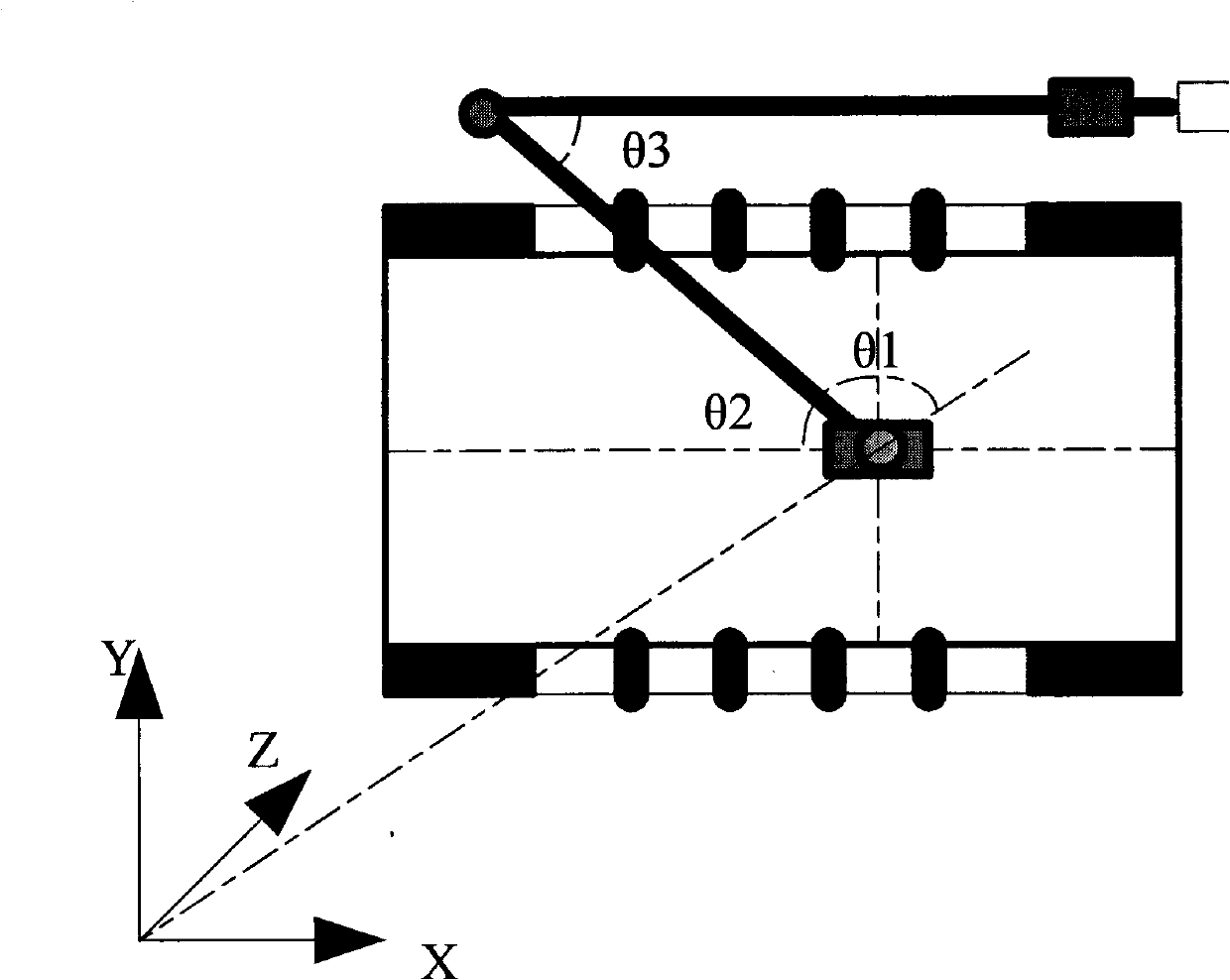
[0076] Body geometry parameters: r=0.105; k l = 1; k r = 1; l f =0.09; b=0.205; l 0 =0.6;
[0077] Geometric parameters of manipulator: l 1 =0.1; l 2 =0.6; l 3 =0.35; l 4 = 0.1;
[0078] Center of mass position of manipulator: pc 1 = 0.07 / 0.1; pc 2 = 0.27 / 0.6; pc 3 = 0.112 / 0.35; pc 4 =0.031 / 0.1;
[0079] The height of the center of mass of each joint of the mobile manipulator: zc 0 =0.25; ll 0 =0.25; ll 1 =0.6; zc 1 =ll 1 +pc 1 *l 1 ;
[0080] Mass of each joint of the mobile manipulator: m 0 =25;m 1 =6.84; m 2 =3.24; m 3 =1.54; m 4 = 1.74;
[0081] Gravitational acceleration: g=9.8
[0082] Moment of inertia of each joint of mobile manipulator: j 0 =0.5512; j 1 =0.077; j 2 =0.18; j 3 =0.035; j 4 =0.005
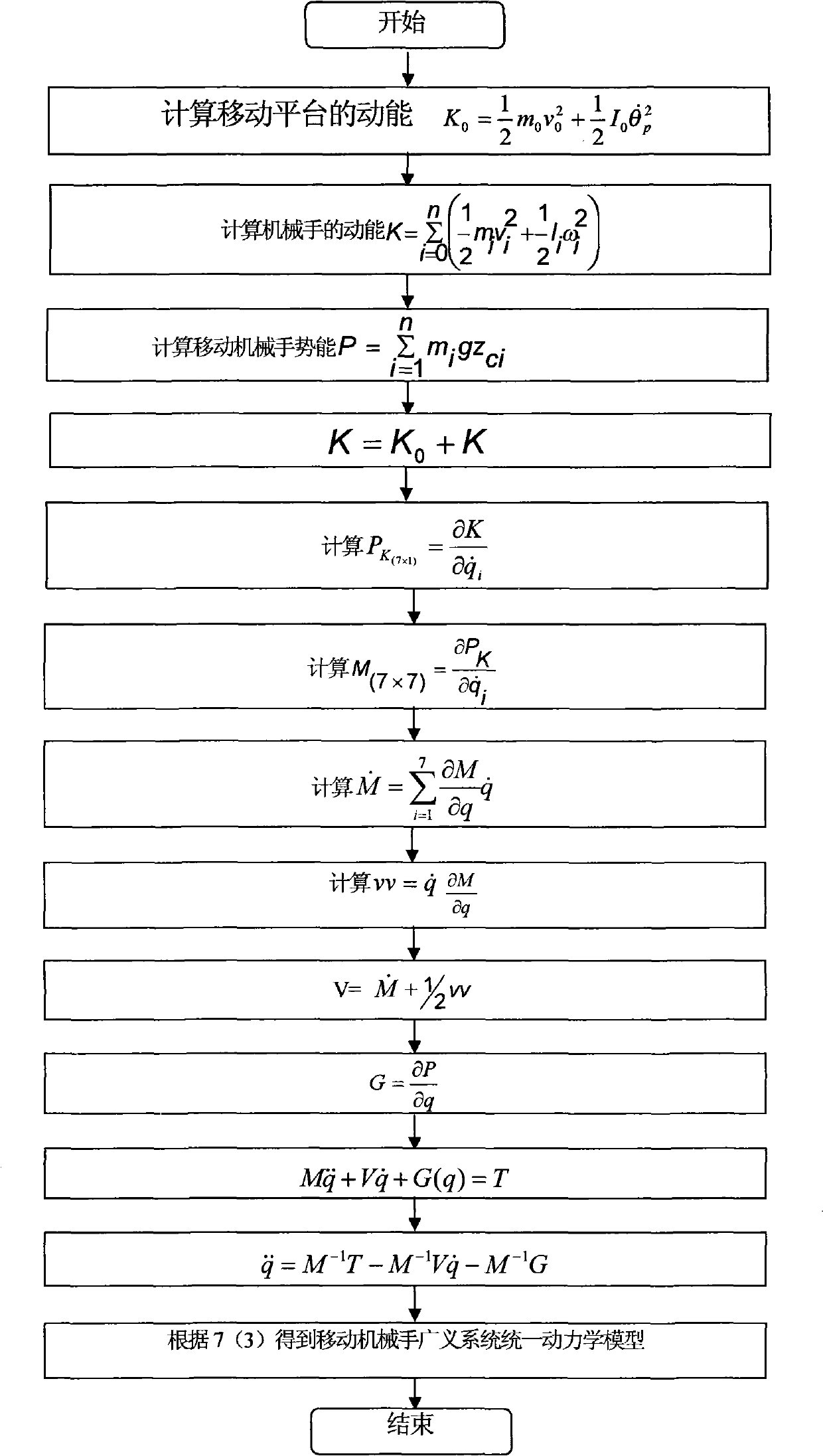
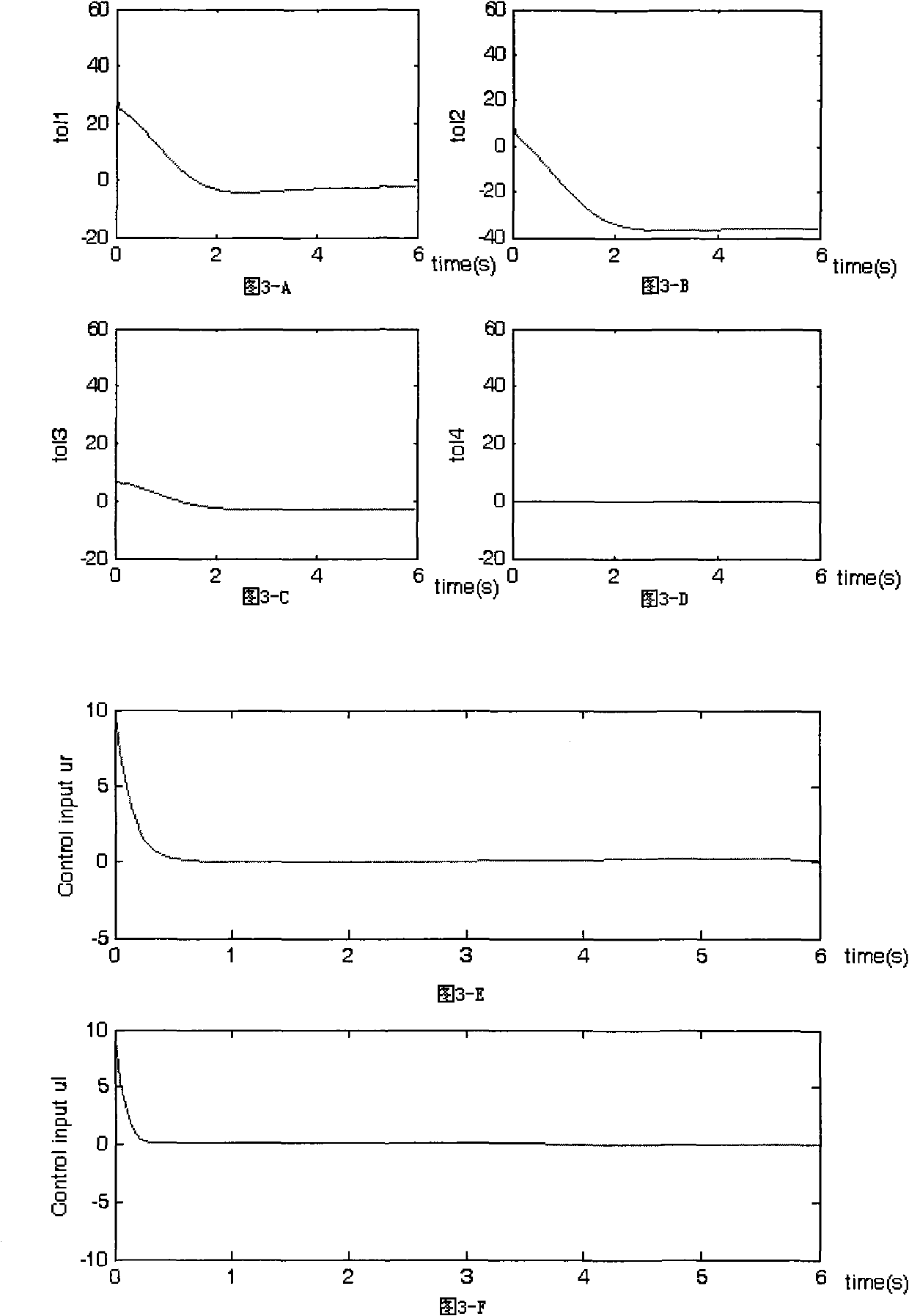
[0083] After establishing the generalized system unified dynamics model with the method described in the manual, directly add the unified PID coordination controller, τ =...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com