Mine searching multi- robot system based on wireless sensor network
A wireless sensor and multi-robot technology, applied in the field of search and detection, can solve the problems of rapid transmission of on-site environmental information and trapped personnel information, and achieve the effects of overcoming rapid transmission, strong environmental awareness, and high communication reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
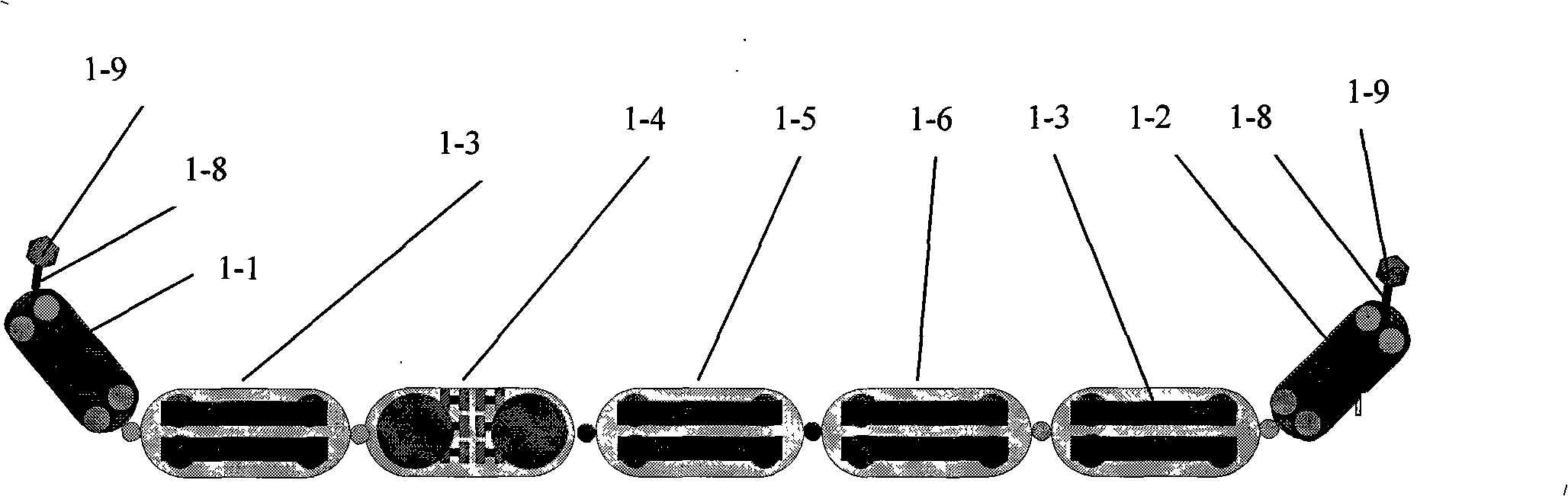
[0009] Specific implementation mode one: the following combination figure 1 and figure 2 This embodiment will be specifically described. This embodiment is composed of the following devices: a multi-joint robot 1, which has a snake-shaped slender structure and adopts a crawler walking mode, which can meet the requirements of complex obstacles in the mine for the robot's terrain attachment ability and small volume; the multi-joint robot 1 has a loading compartment, which can carry multiple small detection robots 2; the multi-joint robot 1 has an information perception system, and can determine the position of trapped miners, detect the types of harmful gases, the content of harmful gases and Ambient temperature to determine the presence and location of open flames;
[0010] Small scouting robot 2, the small two-wheeled scouting robot has the characteristics of simple structure and easy to carry. After being released along the way, it becomes a monitoring node of the type of ...
specific Embodiment approach 2
[0015] Specific implementation mode two: the following combination figure 1 This embodiment will be specifically described. The difference between this embodiment and Embodiment 1 is that the cameras 1-9 are CCD infrared cameras, which are convenient for identifying the environment in the dark and searching for trapped persons.
specific Embodiment approach 3
[0016] Specific embodiment three: the difference between this embodiment and embodiment one is: the head unit 1-1 and the tail unit 1-2 are equipped with an infrared ray (IR) distance sensor so as to determine the distance and height of the obstacle ahead, etc. Thus providing effective information for path planning.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com