Rope-driven redundancy mechanical arm
A redundant and robotic arm technology, applied in the direction of manipulators, claw arms, joints, etc., can solve problems such as slipping of the elbow joint and affecting control accuracy
Inactive Publication Date: 2007-09-05
BEIHANG UNIV
View PDF0 Cites 32 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The purpose of the present invention is to provide a rope-driven redundant mechanical arm, which effectively solves technical problems such as the elbow joint of the existing rope-driven mechanical arm is prone to slipping and affects control accuracy.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
no. 1 example
no. 2 example
no. 3 example
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
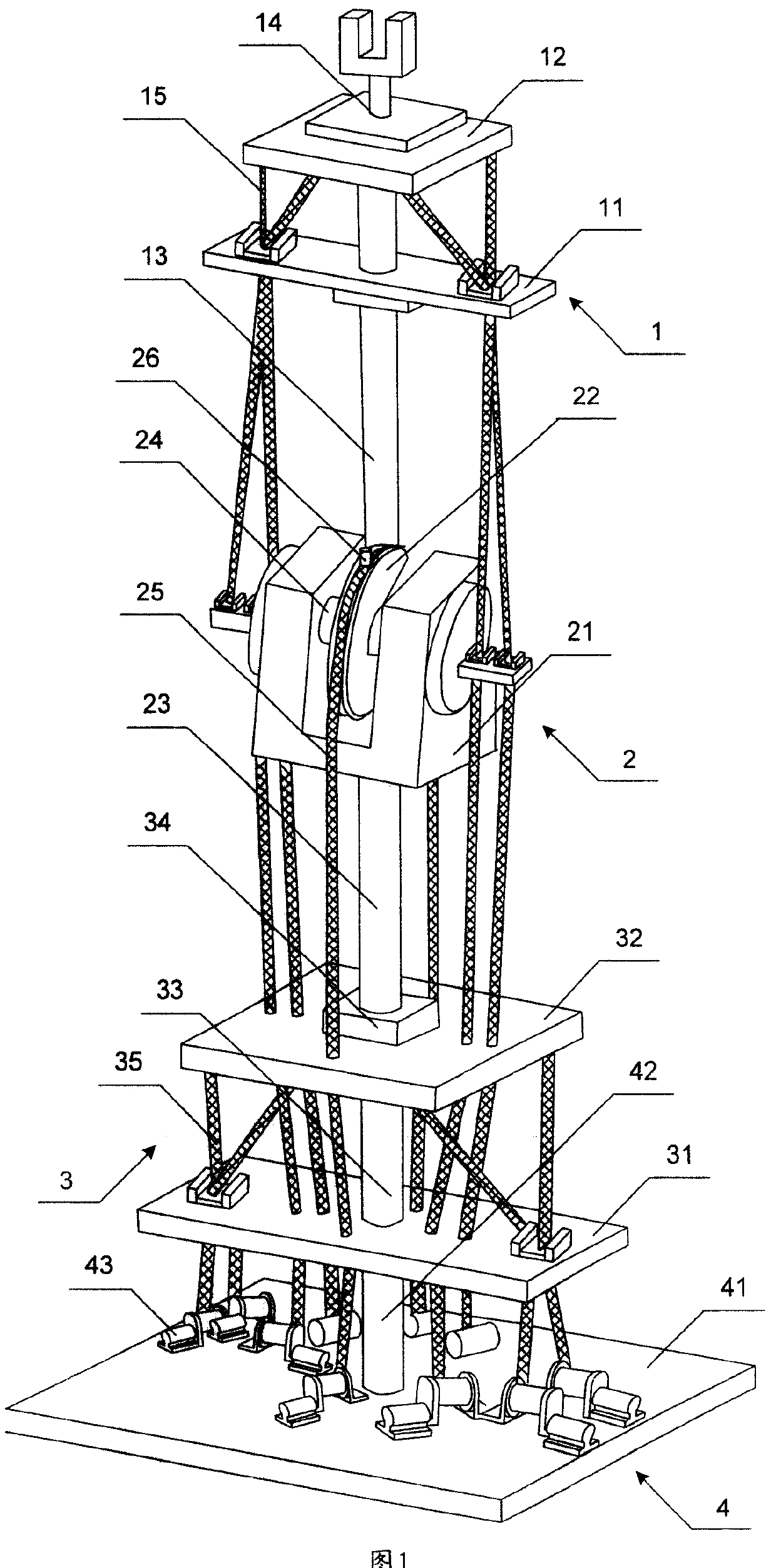
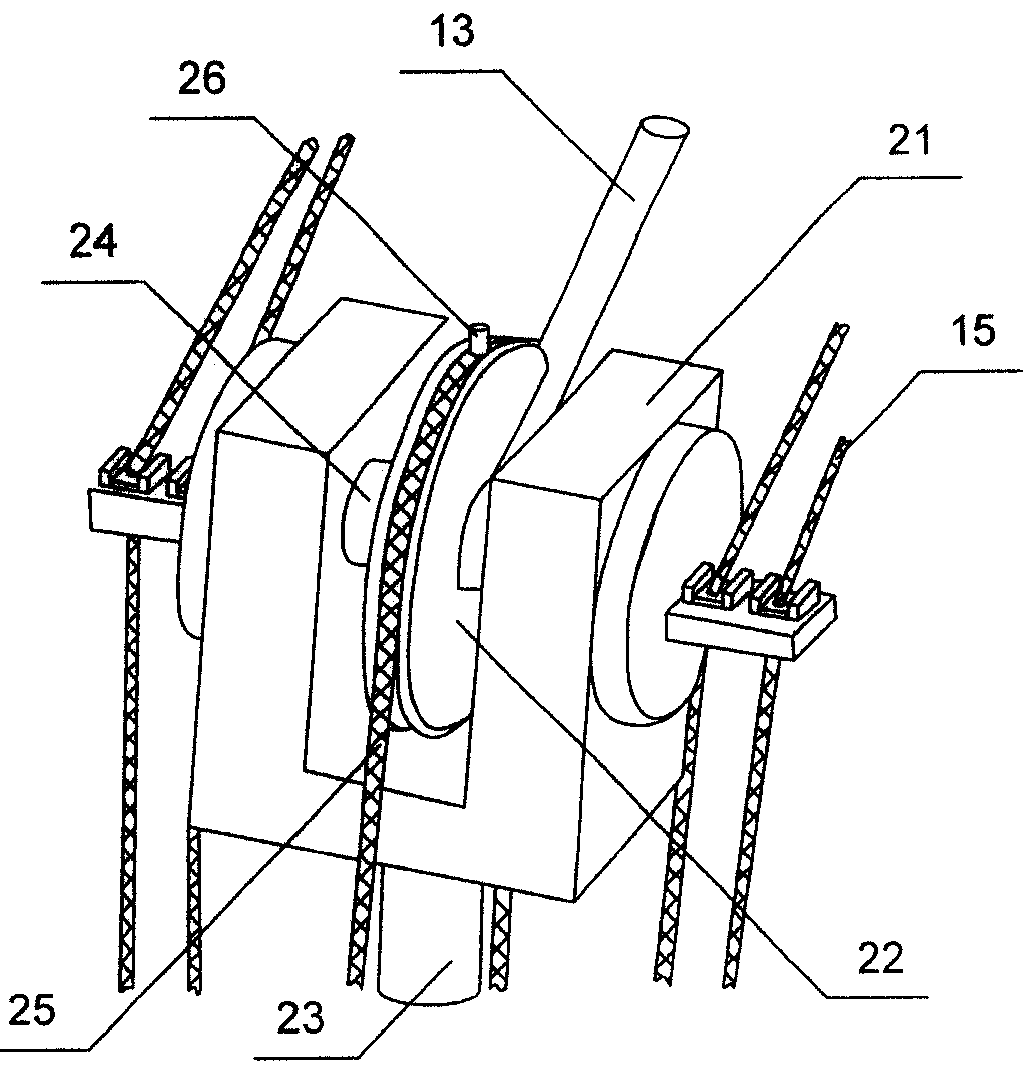
A redundant manipulator driven by strings is composed of a base, a one-freedom elbow joint consisting of fixing platform, drive wheel, joint rod, drive axle and manipulating strings, and the three-freedom wrist and shoulder joints consisting of fixed platform, movable platform, joint rod, spherical bearing, and manipulating strings. Said manipulating string and / or drive wheel have stop mechanism, preventing skid.
Description
technical field The invention relates to a mechanical arm, in particular to a rope-driven redundant mechanical arm. Background technique Redundant robots play an important role in the development of today's intelligent robots due to their high flexibility. The motors of traditional anthropomorphic arm robots are all installed at the joints, which increases the inertia and mass of the robot, reduces the load-bearing capacity of the robot, and is also extremely unfavorable for high-speed movement and quick response. Rope drive has brought new ideas to overcome the influence of traditional robot drive on robot performance. The rope-driven anthropomorphic arm robot uses a rope-driven parallel mechanism to replace the joints of the anthropomorphic arm robot, which effectively reduces the weight of the arm and improves the speed. Responsiveness, suitable for occasions with strict requirements on weight and moment of inertia, such as aerospace. Since the motor and the control ci...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Applications(China)
IPC IPC(8): B25J18/00B25J17/00B25J19/00
Inventor 陈伟海于守谦张建斌
Owner BEIHANG UNIV
Features
- R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com