Environment sensing one-eye visual navigating method adapted to self-aid moving vehicle
An autonomous mobile and environment-aware technology, applied in navigation, surveying and navigation, road network navigator, etc., can solve the problems of unseen monocular measurement navigation, incomplete and missing monocular three-dimensional measurement, etc., and achieve real-time performance requirements, convenient operation, and simplified calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0024] Such as figure 1 Shown, be the method flowchart of the present invention, concrete steps are as follows:
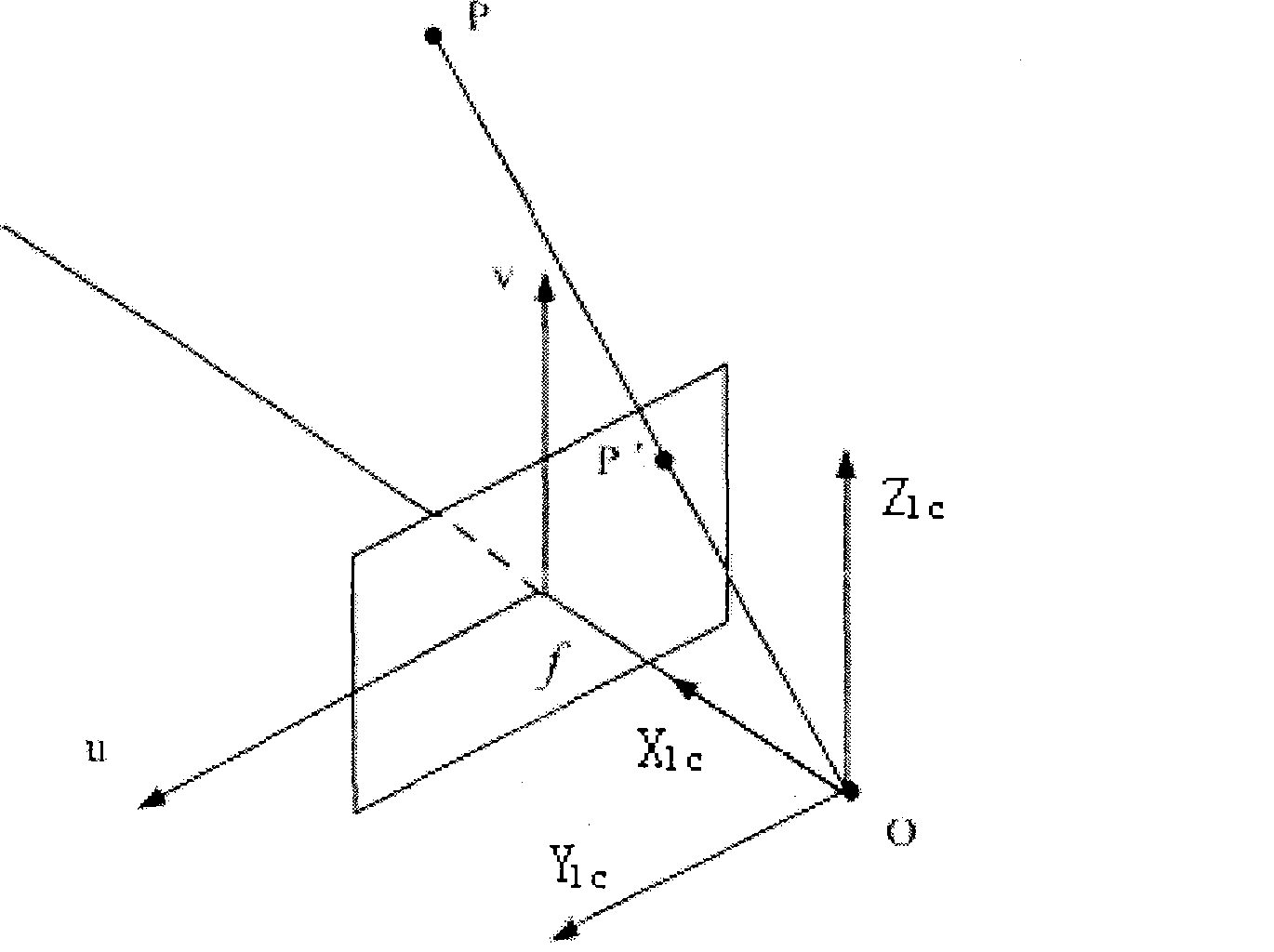
[0025] (1) Measure the internal parameters of camera distortion, install the camera on the autonomous mobile vehicle after measurement, and determine the transformation relationship from the image plane coordinate system to the world coordinate system;
[0026] (2) Record the current posture of the car body, collect images within the visible range of the current car body, and send the collected images back to the graphical operation interface, select the walking mode of the car body according to the target position and image conditions, and then analyze the collected images Perform distortion correction so that the corrected image satisfies the principle of pinhole imaging, select the walking path and the path points on the path according to the distortion-corrected image, and use the current position of the car body and the selected path points according to the im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com