Methods and systems for detecting staple cartridge misfire or failure
a technology of staple cartridges and methods, applied in the field of methods and systems for detecting staple cartridge misfire or failure, can solve the problems of reducing the effectiveness of surgical devices, affecting the safety of patients, so as to reduce the potential for tissue damage and increase the force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
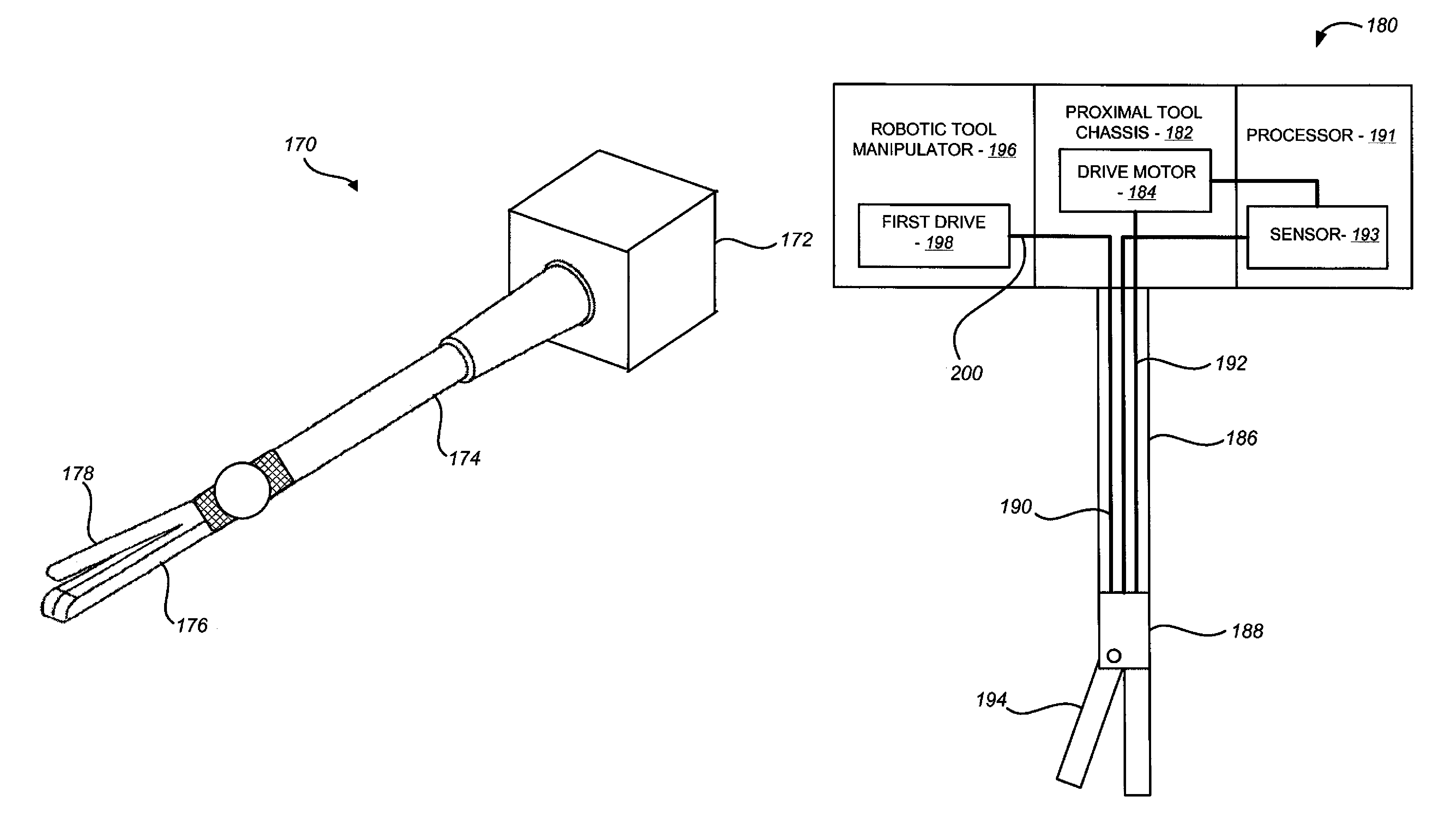
[0044]Improved systems and methods related to clamping and / or fastener firing are provided. The present teachings relate to providing an indicator of whether clamping of a given material fails during clamping. The teachings may be used in systems having jaw members for clamping a material or firing of a staple into a clamped material. The claimed system and methods are particularly useful for minimally invasive surgical applications, as they allow for failure detection in constrained environments from outside the body. Such systems often include end effectors having jaws that clamp a body tissue and fire a staple into the tissue at a relatively high force. Clamping at a high clamping force allows the user to perform various procedures requiring a hard clamp. For example, a physician may require a hard clamp of body tissues before cutting, sealing or stapling of tissue. Firing of staples or other fasteners may also require use of relatively high forces to drive the staple through the...
PUM
| Property | Measurement | Unit |
|---|---|---|
| actuation force | aaaaa | aaaaa |
| threshold | aaaaa | aaaaa |
| rotational force | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com