Tendon-driven endoscope and methods of insertion
a technology applied in the field of tendons and endoscopes, can solve the problems of complicated insertion of the colonoscope, and increased complications, and achieve the effect of preventing unintended tension on the tendons
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
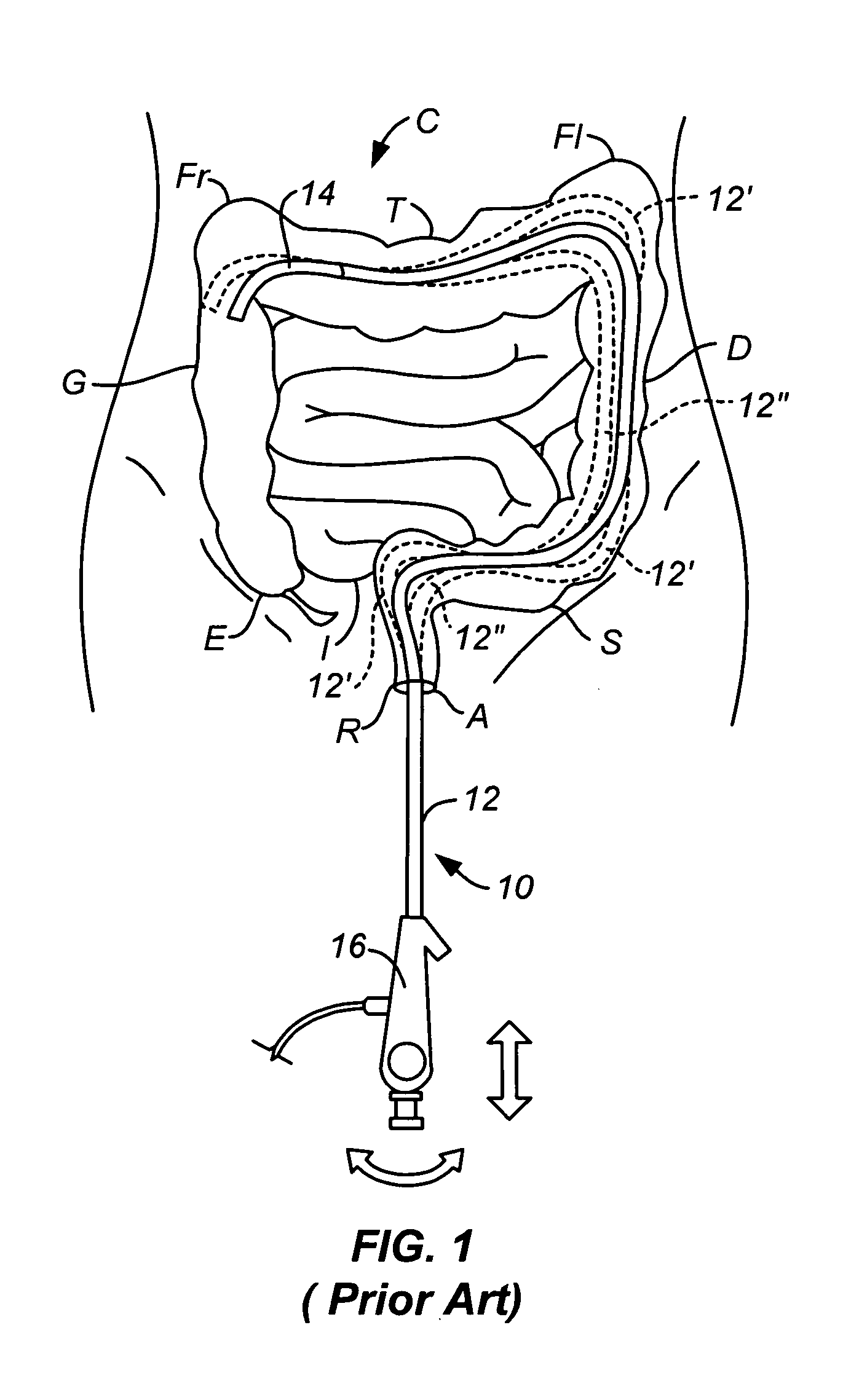
[0046]FIG. 1 shows a prior art colonoscope 10 being employed for a colonoscopic examination of a patient's colon C. The colonoscope 10 has a proximal handle 16 and an elongate body 12 with a steerable distal portion 14. The body 12 of the colonoscope 10 has been lubricated and inserted into the colon C via the patient's anus A. Utilizing the steerable distal portion 14 for guidance, the body 12 of the colonoscope 10 has been maneuvered through several turns in the patient's colon C to the ascending colon G. Typically, this involves a considerable amount of manipulation by pushing, pulling and rotating the colonoscope 10 from the proximal end to advance it through the turns of the colon C. After the steerable distal portion 14 has passed, the walls of the colon C maintains the curve in the flexible body 12 of the colonoscope 10 as it is advanced. Friction develops along the body 12 of the colonoscope 10 as it is inserted, particularly at each turn in the colon C. Because of the frict...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com