Flexible exoskeleton elbow joint based on pneumatic muscles
A pneumatic muscle and exoskeleton technology, applied in passive exercise equipment, artificial arms, manipulators, etc., can solve problems such as complex structures, and achieve the effects of enhanced fidelity, simple structure, and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] Further illustrate the present invention below in conjunction with accompanying drawing.
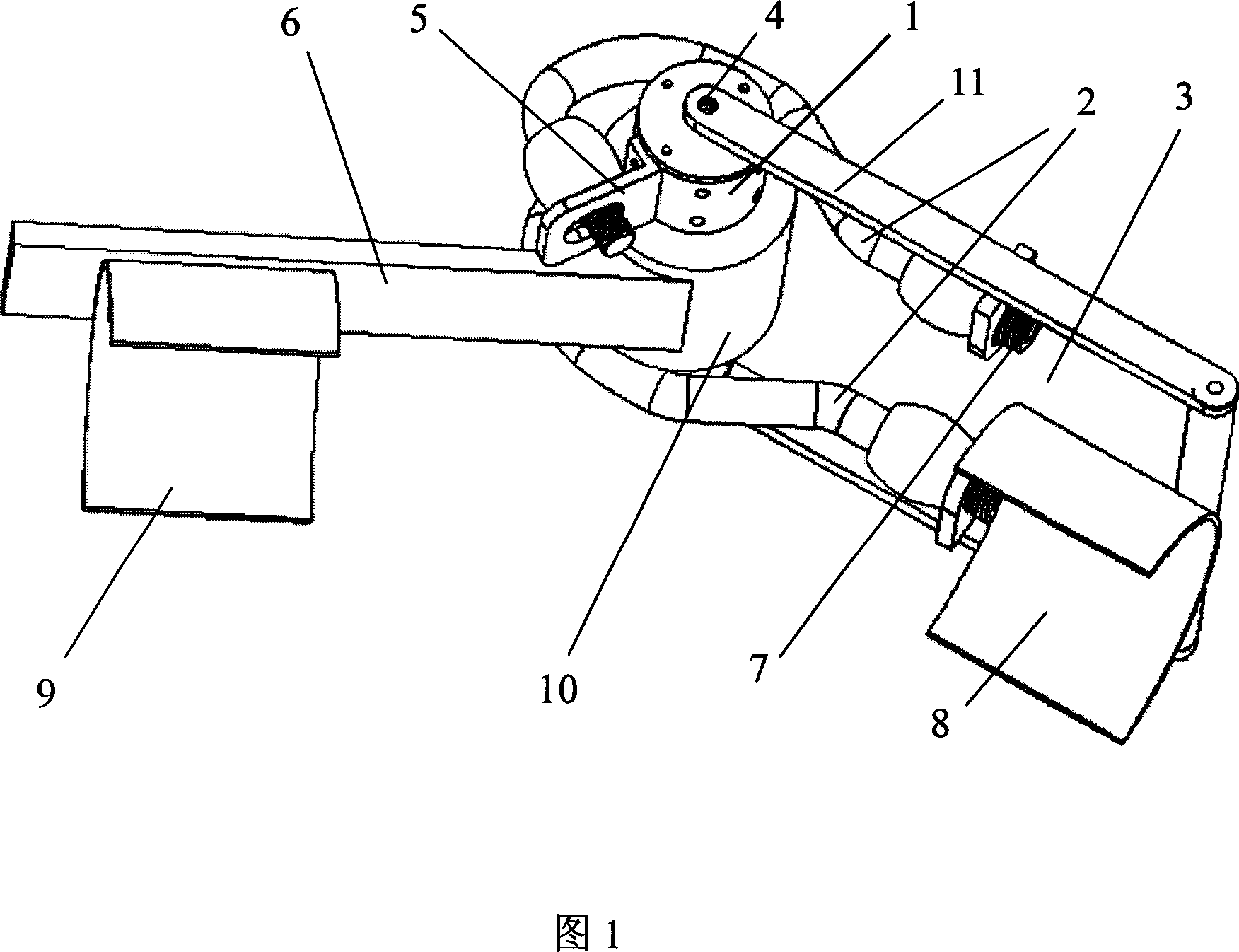
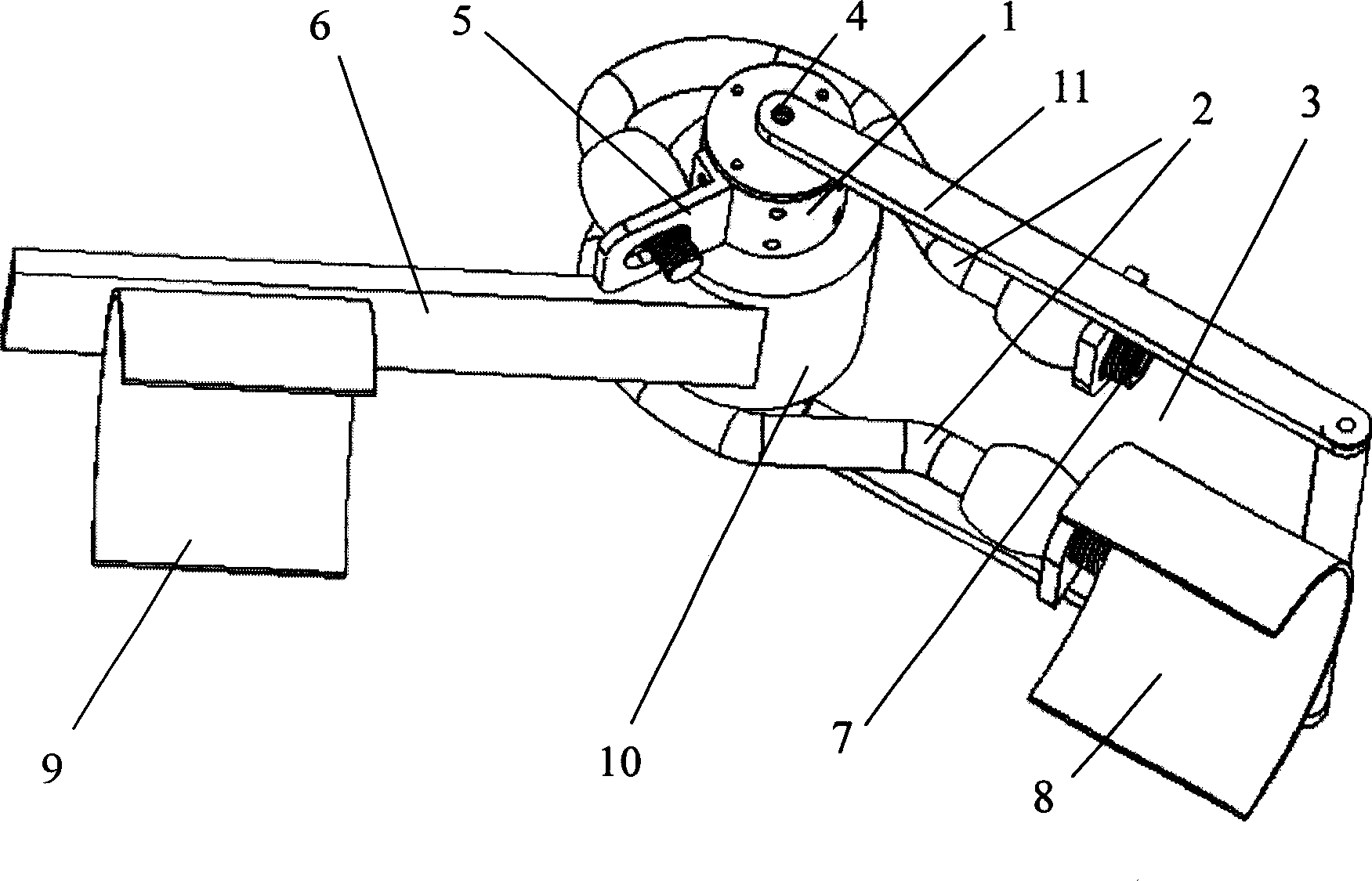
[0010] Referring to the accompanying drawings, the pneumatic muscle-based flexible exoskeleton elbow joint of the present invention includes a single-degree-of-freedom rotary motion joint 1, two pneumatic muscles 2 installed in forward and reverse bending and an operator wearing a bracket 3, and the single-degree-of-freedom rotary motion joint 1 includes The torque sensor 10 and the U-shaped connecting rod 11, the two ends of the torque sensor 10 are respectively equipped with rolling bearings 4, and the two ends of the opening of the U-shaped connecting rod 11 are respectively hinged with the rolling bearings to form a rotary motion pair; two forward and reverse bending pneumatic muscles 2 are respectively fixed with the straight rods of the U-shaped connecting rod 11, and the curved ends of the two pneumatic muscles are respectively connected with the torque sensor 10 through the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com