Four-freedom parallel robot mechanism with three translational dimensions and one rotational dimension
A three-dimensional translation, degree of freedom technology, used in manipulators, program-controlled manipulators, metal processing machinery parts, etc., can solve the problems of not many four-degree-of-freedom parallel mechanisms, accumulation of rod errors, and low end precision, etc. It has the effect of large size, strong standardization, and reduced difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to better understand the present invention, the present invention will be further described below in conjunction with the accompanying drawings.
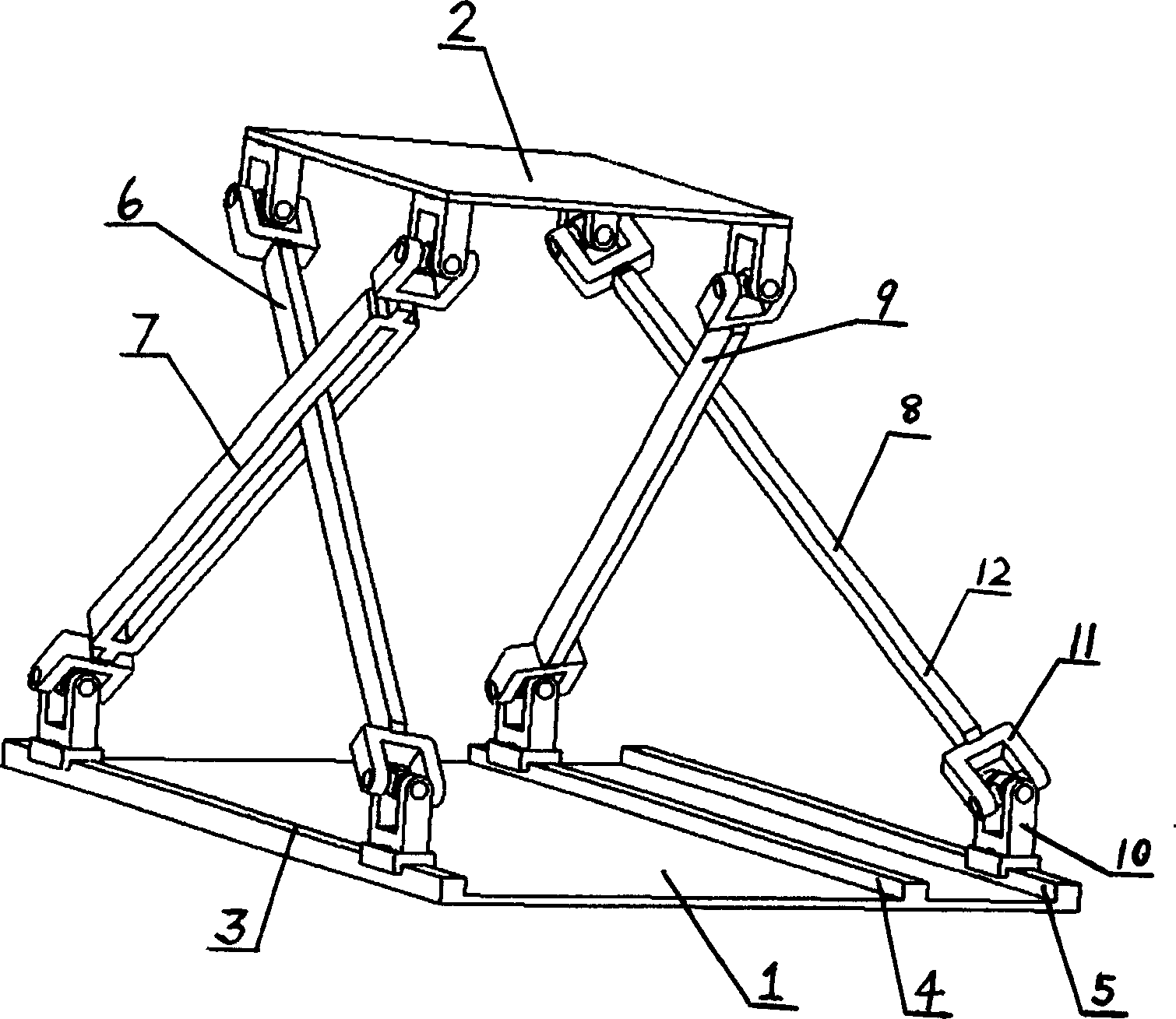
[0022] like figure 1 As shown, the four-degree-of-freedom parallel robot mechanism with three-dimensional translation and one-dimensional rotation of the present invention includes a static platform 1, a dynamic platform 2, a branch connecting the static platform 1 and the dynamic platform 2, and the dynamic platform 2 connects with the static platform through four branches. 1 connected, there are three mutually parallel guide rails 3, 4, 5 on the static platform 1, branches 6 and 7 intersect each other, and are connected with guide rail 3; branch 8 is connected with guide rail 5, and branch 9 is connected with guide rail 4; Each branch comprises a moving pair 10, two Hooke hinges 11 and a branch rod 12, one end of the branch rod 12 is connected with the moving platform 2 through the Hooke hinge 11, and the other end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com