Control method for building environmental protection robot and robot using the method
A cleaning robot and control method technology, applied in the field of robots, can solve the problems of poor cleaning effect, poor coordination of multi-directional cleaning path planning, and many pipelines.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] specific implementation plan
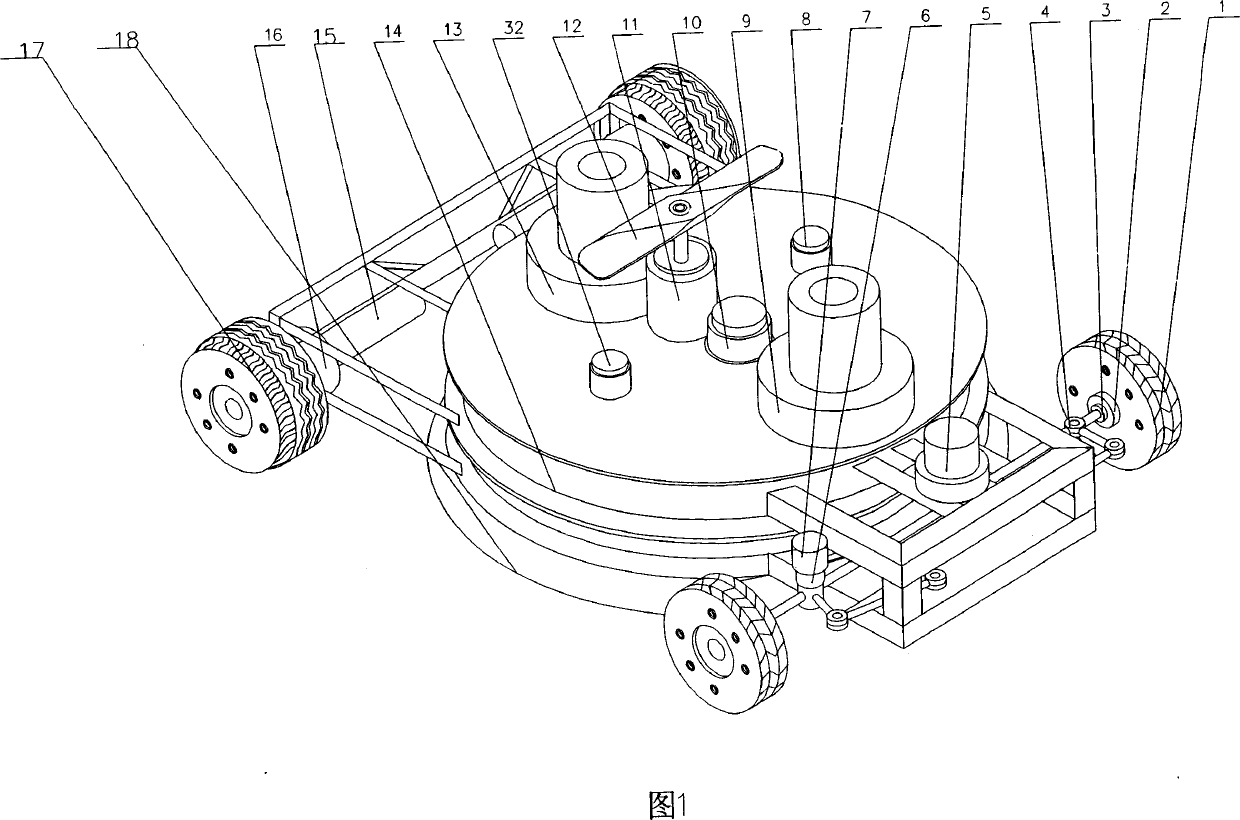
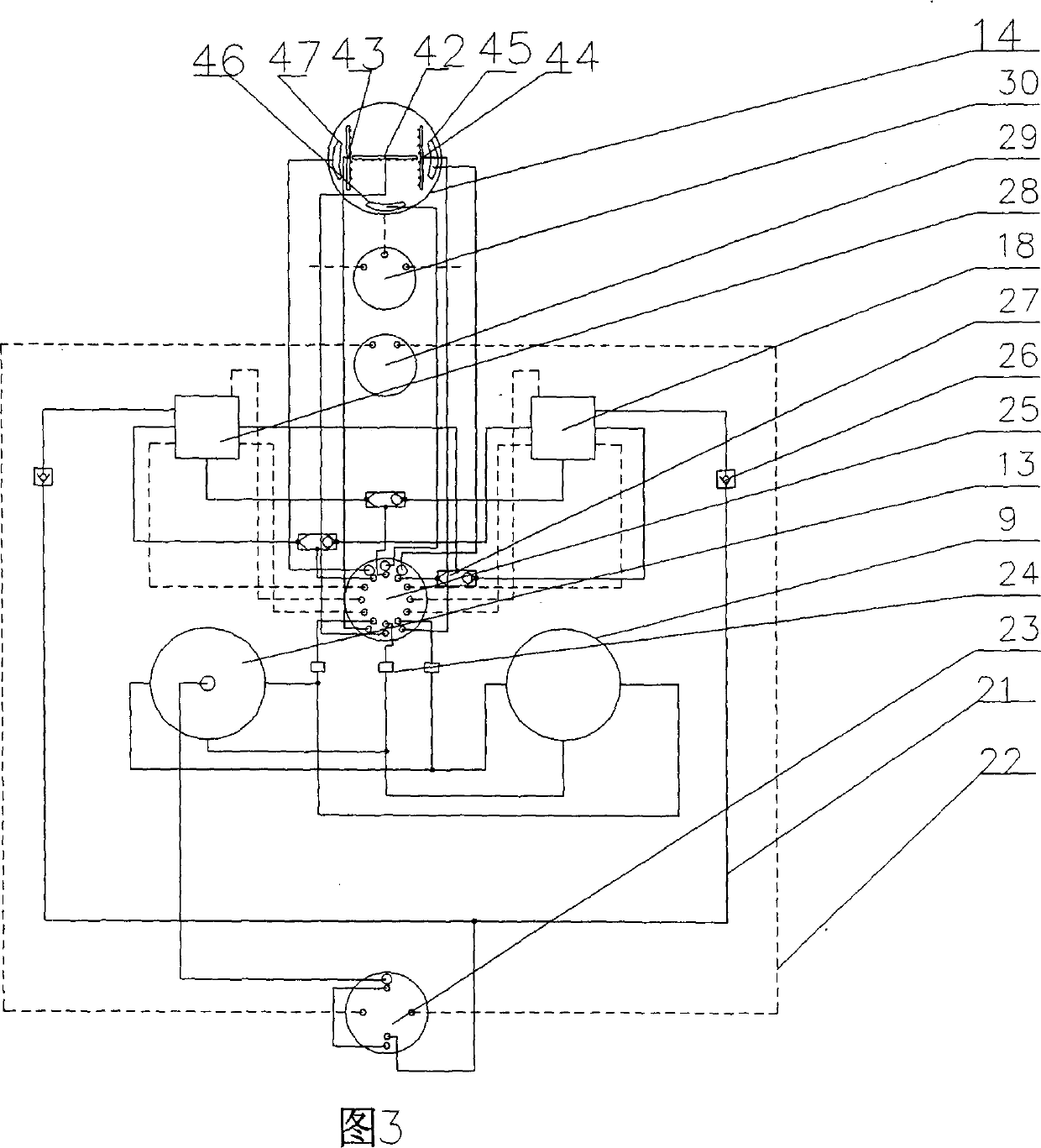
[0016] When the robot of the present invention starts to work, firstly, the propeller 12 is driven by a high-speed rotating motor 11 to generate a certain positive pressure, and the robot body is pushed to the wall surface, and is adsorbed on the wall surface by a suction cup (consisting of a negative pressure chamber 14 and a sealing ring) Above, the negative pressure is formed by the fan 13 and the suction fan 9, and when the negative pressure is insufficient, the propeller will play the role of compensating the negative pressure.
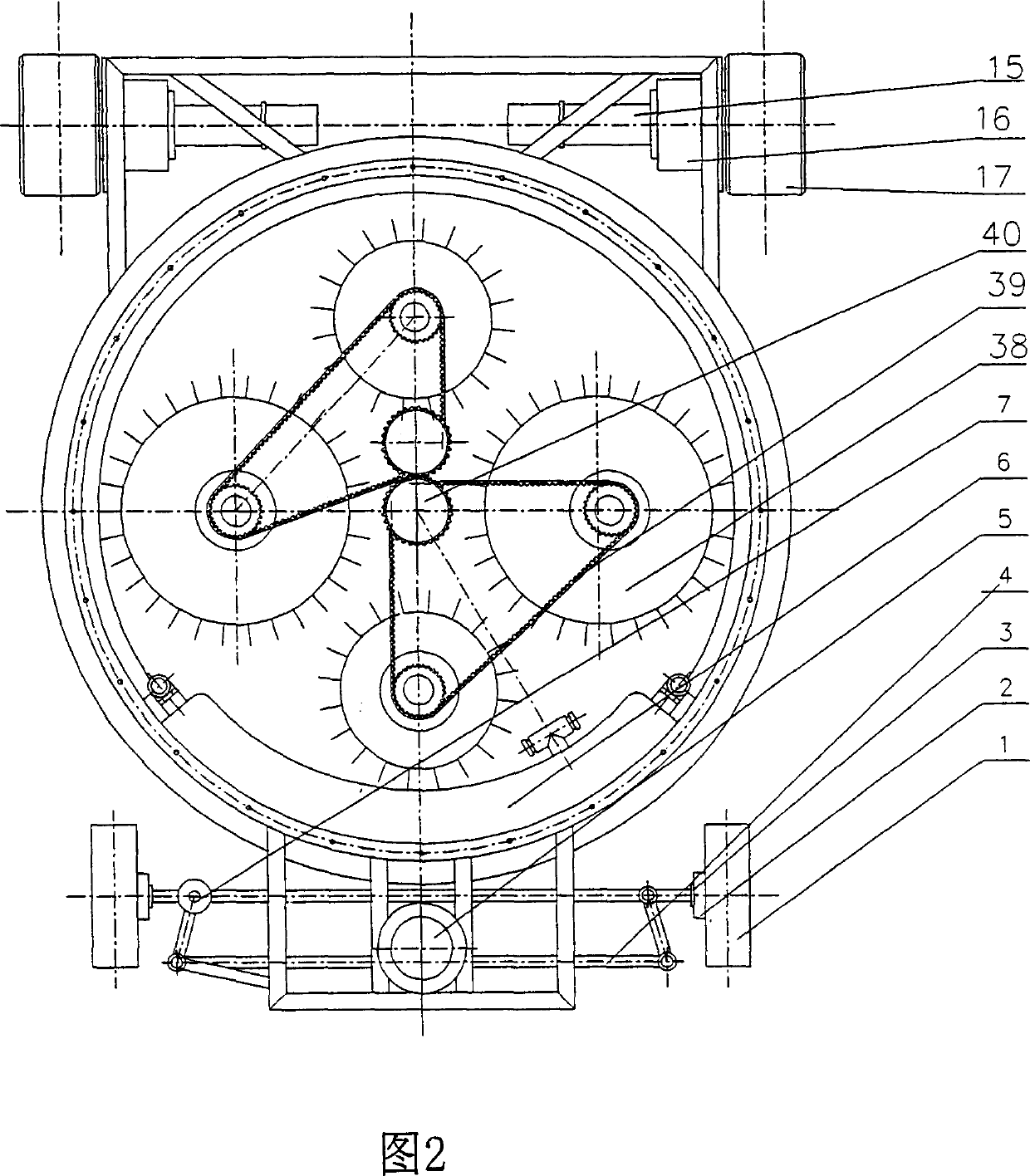
[0017] The AC servo motor 15 drives the wheel 17 to drive the robot body through the reducer 16, and under the action of the inclination sensor, it has the function of fine-tuning and correcting the robot body.
[0018] The synchronous motor 3 drives the wheel 1 through the cooperation of the clutch 2, and plays a compensating drive to the robot body. The stepper motor 5 acts on the wheel 1 through the reduce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com