Collaborative navigation method in communication limited environment based on graph optimization
A communication-limited, collaborative navigation technology, applied in navigation through speed/acceleration measurement, navigation calculation tools, combustion engines, etc., can solve problems such as insufficient anchor point observation signals, dynamic changes in the topology of collaborative navigation nodes, etc., and achieve comprehensive The effect of improving positioning accuracy and suppressing the divergence of navigation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
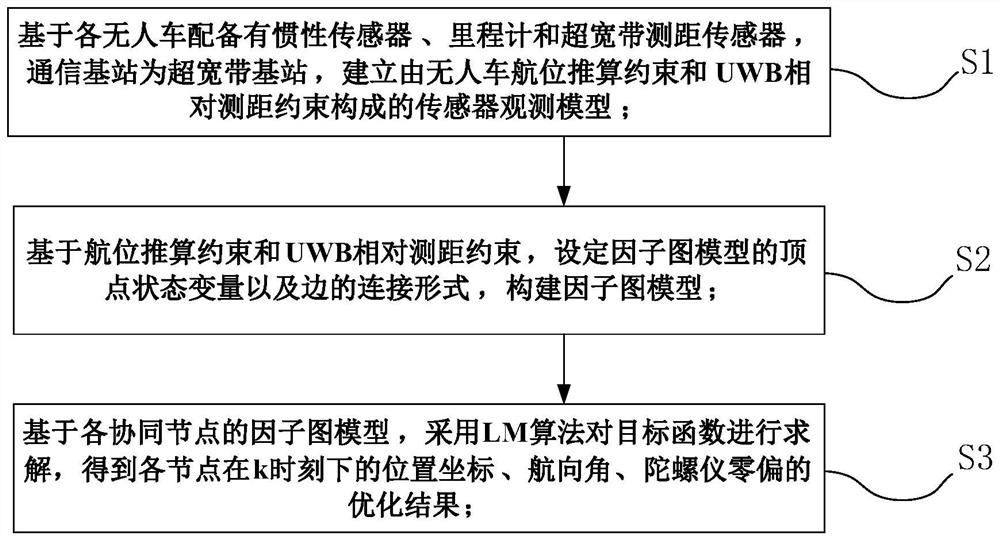
[0057] The present invention will be further described below with reference to the accompanying drawings and specific embodiments, but the following embodiments do not limit the present invention by any means.
[0058] like Figure 5 A typical indoor communication occlusion environment is shown. Specifically, in the initial state, the environment is divided into the internal environment of the room and the external environment of the room. There are three unmanned vehicles in total, two of which are located indoors and one unmanned. The car is located outdoors; there are three communication base stations set up outside, one communication base station is located on the west side, and the other two communication base stations are arranged at intervals and located on the south side of the room, and the two communication base stations are at the same distance from the room; There are three entrance doors spaced apart on the side wall, and one entrance door is opened on the west si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com