Method for controlling braking of driving training vehicle
A vehicle braking and driving training technology, applied in the field of vehicle collision safety, can solve the problems of late active braking intervention time and poor experience of students, so as to improve the efficiency of driving training and improve the driving experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below with reference to the embodiments and the accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
[0015] The embodiment discloses a method for controlling the braking of a driving training vehicle, which mainly includes the following steps:
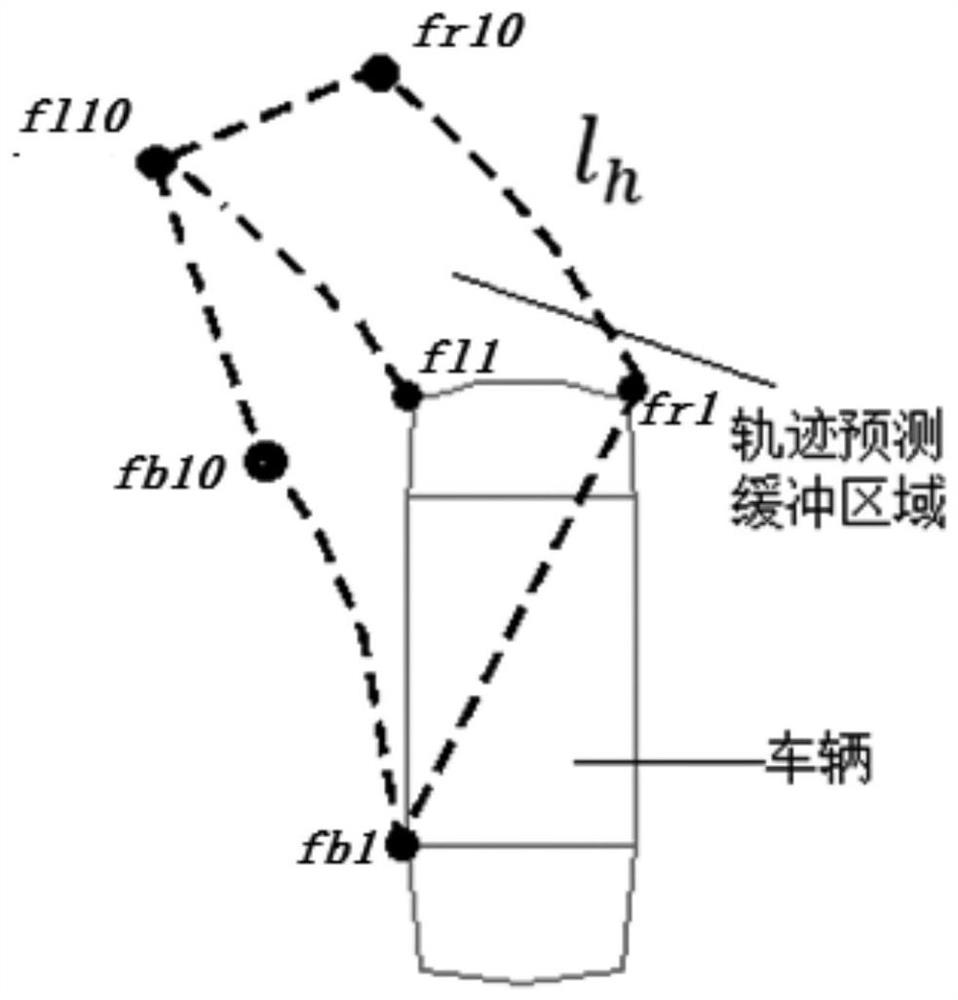
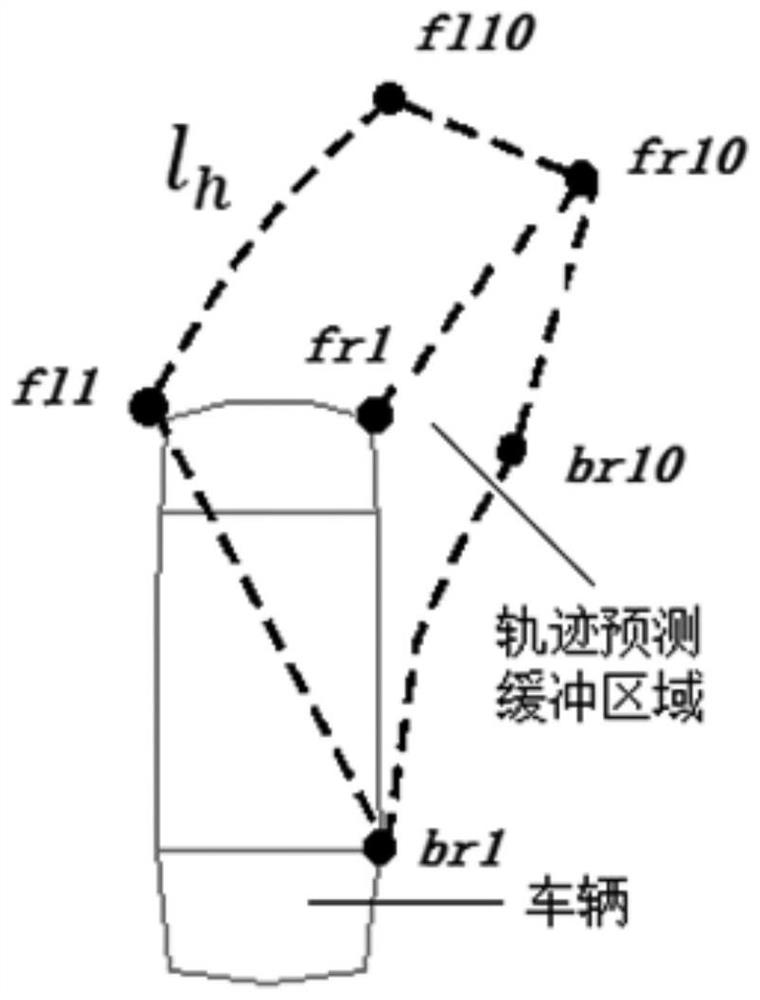
[0016] Step 1) Obtain the longitude and latitude coordinates of the vehicle GPS main antenna (referred to as "GPS main antenna coordinates") and the vehicle heading angle information in real time through the vehicle dual GPS antenna, and combine the vehicle GPS main antenna to the two corners of the front of the vehicle and the rear of the vehicle. The distance between the wheels is calculated to obtain the real-time coordinates of the two corner points of the front of the car and the two rear wheels of the vehicle. It should be noted that the dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com